Inhaltsübersicht
Kategorien durchsuchen
Top-Autoren





Messung digitaler Signale mit digitalen Encodern, Tachometern und Drehzahlmessern

September 30, 2025
In diesem Artikel befassen wir uns mit der Messung digitaler Signale und der Verwendung von digitalen Encodern, Tachometern und Drehzahlmessern mit den aktuell besten Datenerfassungssystemen, und zwar so detailliert, dass Sie:
SEHEN, wie diese Sensoren funktionieren;
LERNEN, wie digitale Sensoren mit analogen Daten synchronisiert werden;
VERSTEHEN, wie Sie sie in Ihren Tests einsetzen können.
Die meisten Ingenieure wissen, dass Datenerfassungssysteme dazu verwendet werden, zeitbezogene Signale zu messen, wie Spannungen, Temperaturen und Ströme, von Beschleunigungsmessern erfasste Schwingungen, von Wheatstoneschen Brückenschaltungen mit Dehnungsmessstreifen erfasste Dehnungen und vieles mehr.
Häufig müssen jedoch diskrete Ereignisse und Drehwinkelsignale gemessen werden, die synchron zu den gewöhnlicheren zeitbezogenen Daten sind. Diskrete Ereignisse sind Ereignisse, die nur zwei mögliche Werte haben, wie z. B. Ein/Aus-Schalter usw.
Diese werden manchmal auch als „digitale Signale“ bezeichnet, da sie im Wesentlichen aus High-Low-Spannungszuständen („ein/aus“) bestehen. In den folgenden Abschnitten präsentieren wir einige Beispiele für diese zusätzlichen Signaltypen und erörtern, wie sie am besten gemessen und mit den anderen Daten synchronisiert werden können.
Was sind diskrete bzw. digitale Signale?
Schauen wir uns einmal den Fall eines Näherungsschalters oder -sensors an. Er erzeugt eine niedrige Signalspannung (in diesem Beispiel 0 V), wenn sich das zu prüfende Gerät (Prüfling) nicht in der Nähe befindet, und eine höhere (5 V), wenn der Prüfling in Reichweite kommt. Es kann notwendig sein, diesen diskreten Zustand synchron zu unserem Messsystem aufzuzeichnen, um die analogen Daten in einen Zusammenhang zu bringen. Aber wie können wir das tun?


Eine einfache Möglichkeit besteht darin, diese elektrischen Signale in die analogen Eingänge des Messsystems einzuspeisen. Das funktioniert und nimmt nur einen Analogkanal in Anspruch. Was aber, wenn die Zustände von acht, zehn oder mehr Näherungssensoren aufgezeichnet werden müssen?
In diesem Fall wäre es eine enorme Verschwendung unserer relativ teuren, für weite Spannungsbereiche ausgelegten analogen Eingänge, sie für solche einfachen diskreten Signale zu verwenden. Zudem benötigen diskrete Eingänge manchmal eine höhere Bandbreite, als die relativ langsamen Analogeingänge unterstützen können, so dass ein analoger Eingang hier ohnehin nicht die beste Wahl wäre.
Müssen mehrere diskrete Signale erfasst werden, dann ist es effizienter und weitaus kostengünstiger, einen digitalen Eingang zu verwenden, der für diese Aufgabe ausgelegt ist. Im Falle von Dewesoft DAQ Systemen, wie denen der SIRIUS Produktlinie, kann jeder Zählereingang eine Vielfalt an Sensoren mit diskreten digitalen Ausgängen (wie Zähler und Encoder) sowie eine Reihe diskreter digitaler Eingänge verarbeiten.
Und da Zähler/Encoder in der Regel mit einer sehr hohen Abtastrate laufen, ist die Zeitbasis für diese Eingänge mit 102,4 MHz recht hoch, woraus sich eine Bandbreite von 10 MHz ergibt – weit mehr als bei den üblichen analogen Eingängen für physikalische Messungen.
Das einfachste digitale Eingangssignal ist das Ein/Aus-Signal, das wie eine Rechteckwelle aussieht. Man spricht in diesem Zusammenhang auch von diskreten Kanälen oder Ereigniskanälen. Da Signale dieses Typs nur zwei mögliche Zustände haben können, werden sie häufig für die Messung von Ja/Nein-Zuständen verwendet, etwa dazu, anzuzeigen, ob z. B. eine Tür gerade offen oder geschlossen oder ein Schaltkreis an oder aus ist, ein Rotorflügel vorbeiläuft o. ä.
Was ist ein TTL-Signal?
Diskrete Eingangssignale werden normalerweise auf Transistor-Transistor-Logik-Ebene (TTL) von einem Relais oder Wandler ausgegeben, das/der auf einem Pull-up nach 5 V basiert. Theoretisch hat das perfekte TTL-Ein/Aus-Signal eine Spannung von 0 V für OFF (Digitalwert 0) und 5 V für ON (Digitalwert 1). In der Praxis ist es jedoch fast unmöglich, eine solche Präzision zu erreichen, so dass 0–0,8 V für OFF und 2–5 V für ON akzeptiert werden.


Digitale/diskrete Eingänge bei Dewesoft
Jeder Dewesoft Zähler-/Encoder-Eingang besteht aus drei digitalen Eingängen, welche auch separat verwendet werden können. Bestimmte Modelle bieten auch dedizierte, von den Zählereingängen getrennte DI-Leitungen (Digital In).
Vollständige Details finden Sie weiter unten im Abschnitt zur Dewesoft SuperCounter®-Technologie.
Was ist ein Zähler oder Encoder?
Zähler und Encoder werden eingesetzt, um Impulse zu zählen. Aber warum? Manchmal geht es bei einer Anwendung tatsächlich nur darum, zu zählen, sehr oft wird aber auch der Winkel oder die Winkelposition gemessen.
Nehmen Sie zum Beispiel das Lenkrad in Ihrem Auto – es ist wichtig, in Echtzeit genau zu wissen, in welche Richtung das Auto gelenkt wird. Dazu teilt ein Encoder im Lenkrad die 360°-Umdrehung in Tausende diskreter Schritte auf. Er ist zudem so konfiguriert, dass die obere Totpunktposition (Lenkung geradeaus) einem bekannten Drehpositionswert entspricht.
Alle aktuellen Sicherheits- und Kollisionsvermeidungs- sowie Selbstfahrfunktionen in Personenkraftwagen, landwirtschaftlichen Fahrzeugen usw. sind darauf angewiesen, dass der Encoder jederzeit die genaue Position des Lenkrads kennt.
Ganz in der Nähe unseres Lenkrads befindet sich auf dem Armaturenbrett ein Drehknopf, mit dem sich die Lautstärke des Radios verstellen oder der Sender wechseln lässt. Bei diesem Drehregler handelt es sich tatsächlich um einen Encoder mit einem digitalen Ausgangssignal, das an einen Mikrocontroller geht, der die gewählte Encoder-Position liest. Dieser Encoder erlaubt es, die vorhandenen Wahlmöglichkeiten durchzugehen, und zwar in beide Richtungen.
Gewöhnlich wird der Lautstärke-Encoder mit einer Start- und einer Stopp-Position konfiguriert, während der Senderwahl-Encoder stufenlos drehbar ist, um alle Sender zu erreichen. Dies sind nur drei der Encoder-Anwendungen, die die meisten Menschen täglich in ihren Autos nutzen.
Zähler- und Encoder-Anwendungen
Positions- und Winkelpositionssensoren sind in zahlreichen Anwendungen zu finden:
Erfassung von Lenkradpositionen
Erfassung von Pedalpositionen
Erfassung von Drosselklappenstellungen
Drehmomenterfassung
Überwachung und Steuerung von Prozessmaschinen (tausende Anwendungen)
Erhaltung absoluter Positionsreferenzen in CNC-Maschinen
Überwachung der absoluten Position in CNC-Maschinen und MRT-Scannern
Positionsrückmeldung bei Robotern aller Art
elektronische Systeme, insbesondere für die Benutzerschnittstelle
Förderband-Anwendungen
Parksensoren
Ein Winkelpositionssensor misst die Winkelposition einer Welle. Winkelsensoren sind mit zahlreichen verschiedenen Gehäusen und Auflösungen erhältlich, von einfachen induktiven Sensoren, die die Umdrehungen einer Welle zählen, bis hin zu hochauflösenden Encodern, die die 360°-Umdrehung der Welle in Hunderte oder sogar Tausende von Positionen aufteilen und zudem auch die Drehrichtung erfassen.
In der Datenerfassung kommen heute einige verschiedene Arten von Zähler- und Encoder-Sensoren zum Einsatz, darunter:
| Sensor Typ | Beschreibung |
|---|---|
| Näherungssensoren | Erkennen Objekte, die sich innerhalb einer bestimmten Entfernung vom Sensor befinden, und erzeugen einen Impuls. Werden für Zähl-, Tachometer- und Drehgeschwindigkeitsanwendungen verwendet |
| Drehgeber | Drehwellensensor, der in der Lage ist, A-, B- und Z-Signale mit einer Auflösung von tausenden Impulsen pro Vollwinkel auszugeben |
| Lineargeber | Basieren auf der gleichen Technologie wie Drehgeber, erfassen aber lineare Bewegungen |
| Zahnradsensoren | Sensoren mit definierter Anzahl von Impulsen pro Umdrehung (z. B. 60); bei Verwendung von Zahnradsensoren mit fehlenden Zähnen (z. B. 60-2) ist auch der absolute Winkelbezug bekannt |
| Optische Sensoren | Berührungsloser optischer Winkelsensor, der entweder ein Loch in einer rotierenden Scheibe oder abwechselnd schwarze und weiße Streifen auf einem an einer Welle angebrachten Band erfasst |
Schauen wir uns diese Sensortypen nun einmal näher an, um zu sehen, wie sie in moderne DAQ-Systeme integriert werden können.
Näherungssensoren
Ein Näherungssensor ist in der Lage, ein in der Nähe befindliches Objekt berührungslos zu erkennen und dann ein entsprechendes Impuls- oder Spannungssignal auszugeben. Es gibt verschiedene Arten von Näherungssensoren, die je nach Zusammensetzung des Objekts bzw. der Objekte ausgewählt werden, das oder die erfasst werden sollen.


Ein induktiver Näherungssensor erzeugt zum Beispiel ein elektromagnetisches Feld um seine Messstelle. Dem bekannten magnetoresistiven Effekt zufolge ändert sich der Widerstand bestimmter (insbesondere eisenhaltiger) Objekte, wenn sie Magnetfeldern ausgesetzt werden. Die meisten Näherungssensoren machen sich diesen Effekt zunutze, indem sie ein kleines Magnetfeld erzeugen und dann erfassen, wenn es durch das Vorhandensein eines solchen Objektes bzw. Materials unterbrochen oder signifikant beeinflusst wird.
Wenn wir also einen solchen Sensor in der Nähe einer rotierenden Welle platzieren und an dieser Welle dann eine eisenhaltige Markierung anbringen, die bei jeder Umdrehung am Sensor vorbeiläuft, haben wir eine sehr zuverlässige und genaue Drehzahlmessung. Der Sensor detektiert die Feldunterbrechung und gibt ein Impuls- oder Spannungssignal aus, das von jedem Datenerfassungssystem angezeigt und aufgezeichnet werden kann.


Es gibt auch kapazitive Näherungssensoren, die unter Nutzung des Prinzips der kapazitiven Kopplung nichtmetallische Objekte erkennen können. Anstatt eines elektromagnetischen erzeugen sie ein elektrostatisches Feld. Wenn ein Objekt in dieses Feld eintritt, verändert es die Kapazität im Oszillatorkreis des Sensors. Dies wird vom Sensor erkannt, der dann ein entsprechendes Ausgangssignal erzeugt. Sowohl bei magnetischen als auch bei kapazitiven Näherungssensoren kann die Empfindlichkeit gegenüber dem Zielobjekt eingestellt werden.
Hinweis: Es gibt auch photoelektrische Sensoren, die Licht abgeben und dann feststellen, ob es reflektiert wird oder nicht. Mehr über diese Sensoren finden Sie im Abschnitt zu Bandsensoren.
Hochentwickelte Messsysteme wie die von Dewesoft können diese Impulse zählen und alle möglichen mathematischen Operationen mit ihnen durchführen, wie (gegebenenfalls) die Umwandlung in U/min, das Zurücksetzen der Werte usw.
Anwendungen von Näherungssensoren
Messung der Drehzahl (U/min) an rotierenden Wellen (Tachometer-Anwendungen)
Zählen von Teilen in einer Fertigungslinie
Erfassung von Fahrzeugen an Kreuzungen (Sensor unter dem Straßenbelag)
Füllstandserfassung in Abfüllanlagen
Erfassung der Position von Objekten auf einem Fließband
Vorteile von Näherungssensoren
Sehr zuverlässig, da sie nie mit den zu erfassenden Objekten in Kontakt kommen; praktisch verschleißfrei
Sehr niedrige Anschaffungs- und Betriebskosten
Kapazitive Sensoren auch zur Dickenmessung geeignet
Induktive Sensoren unempfindlich gegen Wasser, Schlamm usw.
Nachteile von Näherungssensoren
Begrenzte Erfassungsabstände (bei den meisten induktiven Sensoren 70 mm)
Externe Stromversorgung erforderlich
Geeignete Dewesoft-Eingangsmodule
Die Zähler-/Encoder-Eingangsmodule von Dewesoft sind perfekt für Näherungssensoren aller Art geeignet und können die meisten von ihnen bei Bedarf sogar mit Strom versorgen. Vollständige Details finden Sie weiter unten im Abschnitt zur Dewesoft SuperCounter®-Technologie.
Drehgeber
Drehgeber (auch Drehwinkelgeber oder Rotary Encoder) bieten in der Regel eine ausgezeichnete Winkelauflösung, da sie mit tausenden Schritten pro Vollwinkel (360°) erhältlich sind und damit Schritte weit unter 1° erlauben. Viele Drehgeber können auch die Drehrichtung erfassen, was bei einigen Anwendungen unerlässlich ist.


Inkrementale Drehgeber
Inkrementale Drehgeber melden relative Positions- und Richtungsänderungen, erfassen also keine absoluten Positionen (Winkel). Inkrementale Drehgeber geben A- und B-Signale aus, die Bewegungs- und Richtungsänderungen anzeigen. Einige von ihnen können auf eine bestimmte Position „geeicht“ oder referenziert werden. Wenn diese Position erreicht ist, wird ein zusätzliches Z-Ausgangssignal erzeugt. Inkrementale Drehgeber sind die gebräuchlichsten und populärsten Encoder.
Für die Erzeugung ihrer A- und B-Ausgangssignale sind sie als Quadratur-Encoder aufgebaut. Bei dieser Methode wird die Phasenverschiebung zwischen den A- und B-Ausgangssignalen üblicherweise auf +90° bei Drehrichtung im Uhrzeigersinn und -90° bei Drehrichtung gegen den Uhrzeigersinn eingestellt. Diese 90-Grad-Phasenverschiebung zwischen A und B wird als „Quadratur“ bezeichnet.


Wenn sich die Welle nicht dreht, sind die A/B-Ausgangssignale des Drehgebers Null.
Wenn sich die Welle dreht, gibt die Ausgangsfrequenz des Drehgebers unmittelbar mit sehr hoher Genauigkeit die Wellendrehzahl wieder. Die Auflösung des Drehgebers ist durch die Anzahl der Teilungen der 360° einer Wellenumdrehung definiert. Bei inkrementalen Encodern kann dies von ein paar hundert bis hin zu zehntausend Schritten pro Umdrehung reichen.
Inkrementale Drehgeber geben Bewegungs- und Richtungsänderungen mit sehr geringer Latenzzeit aus, wodurch sie ideal für sehr schnelle Anwendungen sind, die von Absolutwertgebern nicht unterstützt werden.
Impulse pro Umdrehung, auch bekannt als PPR (pulses per revolution), ist ein bestimmendes Merkmal von Inkrementalgebern. Dieser Wert gibt an, wie viele Impulse pro voller Umdrehung (360°) der Welle erzeugt werden. Je höher die PPR, desto höher ist die Auflösung des Drehgebers.
Es ist wichtig, dass der Zählereingang, an den Sie einen inkrementalen Drehgeber anschließen, eine ausreichend hohe Bandbreite zur Verarbeitung des maximal möglichen Ausgangssignals hat. Nehmen wir an, wir verwenden einen Drehgeber mit einer Auflösung von 360 PPR, der also 360 Impulse pro Umdrehung erzeugt. Wenn sich dieser Drehgeber mit 600 U/min dreht, dann beträgt seine Ausgangsfrequenz:
Mit den Zählereingängen von Dewesoft brauchen Sie sich keine Sorgen zu machen, da sie mit einer Zeitbasis von 102,4 Mhz arbeiten und für praktisch jeden aktuell auf dem Markt erhältlichen Drehgeber geeignet sind. Weitere Informationen finden Sie weiter unten im Abschnitt zur Dewesoft SuperCounter®-Technologie.
Absolutwertgeber
Wie der Name schon sagt, geben Absolutwertgeber die absolute aktuelle Wellenposition aus, wodurch sie ideal für winkelbasierte Messungen geeignet sind. Sie sind in mechanischer, optischer und magnetischer Ausführung erhältlich.


Während inkrementale Drehgeber einen Impulsstrom liefern, geben Absolutwertgeber eindeutige Werte für jede Position an der Welle aus. Ein weiterer Unterschied besteht darin, dass sie vom Messsystem abgefragt werden müssen, während inkrementale Drehgeber einfach ihre A-, B- und Z-Impulse erzeugen, wenn sich die Welle dreht. Absolutwertgeber geben dann ein Multibit-Datenwort aus, das die genaue Position der Welle anzeigt. Als eindeutiger Wert muss dieses Wort nicht per se dekodiert werden.
Obwohl sie nicht so „schnell“ sind wie Lineargeber, bieten Absolutwertgeber eine höhere Positionsauflösung als inkrementale Drehgeber. Beachten Sie, dass diese Sensoren nicht mit Dewesoft SuperCounter-Eingängen verwendet werden können, da sie keine Impulsausgangssignale erzeugen. Sie benötigen eine digitale Schnittstelle, die die Multibit-Werte einlesen kann. Für Absolutwertgeber stehen u. a. serielle, Feldbus- und Ethernet-Schnittstellen zur Verfügung.
Anwendungen von inkrementalen Drehgebern
Verbraucherprodukte – Trackball-Position, Steuerung von Unterhaltungssystemen
Materialhandhabung – Geschwindigkeitsmessung an Motoren, Förderern, Füllsystemen
PCB-Fertigung – Positionsmessung in Pick-and-Place-Systemen
Textilien, Metalle, Zellstoff und Papier – Maschinengeschwindigkeit, Positions- und Abstandsmessungen
Luft- und Raumfahrt – Stellungsrückmeldung und AntennenpositionierungIncremental Rotary Encoder Pros
Vorteile von inkrementalen Drehgebern
Hohe Geschwindigkeit und niedrige Latenz
Hohe Auflösung (bis zu Tausenden von diskreten Werten in einer 360°-Drehung)
Ausgangssignal mit Referenzpuls (Z-Spur) für absoluten Winkelbezug
Höchst zuverlässig und präzise
Nachteile von inkrementalen Drehgebern
Bei magnetischen Encodern RF- und EM-Störungen möglich
Bei magnetischen Encodern Lichtinterferenzen möglich
Kontamination durch raue Umgebungen möglich
Geeignete Dewesoft-Eingangsmodule
Die Zähler-/Encoder-Eingangsmodule von Dewesoft sind perfekt für Inkrementalgeber aller Art geeignet und unterstützen zahlreiche Encoder-Modi, einschließlich X1, X2 und X4. Vollständige Details finden Sie weiter unten im Abschnitt zur Dewesoft SuperCounter®-Technologie.
Lineargeber
Ein Linear Encoder misst die Position entlang eines linearen Weges. Im Gegensatz zu einem Drehgeber, der im Inneren eine runde Scheibe hat, die es ihm ermöglicht, die Position einer Welle zu messen, bewegen sich die meisten linearen Wegmesssysteme entlang einer externen Skala und bestimmen ihre Position anhand von Markierungen auf dieser Skala.


Ein perfektes Beispiel ist ein Tintenstrahldrucker, der einen Lineargeber verwendet, um den Druckkopf während des Druckens präzise über die Breite des Papiers hin und her zu bewegen. Für diese und zahllose andere Anwendungen sind natürlich eine hohe Auflösung und Genauigkeit erforderlich.
Die Sensortechnologie, die in Lineargebern am häufigsten zum Einsatz kommt, ist die optische, es gibt aber auch Geber, die magnetische, kapazitive oder induktive Technologien verwenden. Optische Encoder sind am genauesten und bieten die höchstmögliche Auflösung, es muss jedoch darauf geachtet werden, dass ihre Funktion nicht durch Verunreinigungen beeinträchtigt wird, die ihre „Sicht“ blockieren.
Es gibt Lineargeber mit analogem und digitalem Ausgangssignal. Die DAQ Systeme von Dewesoft sind besser für digitale Ausgangssignale geeignet, da sie – ganz ähnlich wie die im vorigen Abschnitt beschriebenen inkrementalen Drehgeber – A- und B-Ausgangssignale liefern.
Anwendungen von Lineargebern
CNC-Maschinen
Tintenstrahldrucker
Laserscanner
Pick-and-Place-Montagesysteme
Robotik
Vorteile von Lineargebern
Sehr zuverlässig, da sie nie mit den zu erfassenden Objekten in Kontakt kommen; praktisch verschleißfrei
Sehr niedrige Anschaffungs- und Betriebskosten
Kapazitive Sensoren auch zur Dickenmessung geeignet
Induktive Sensoren unempfindlich gegen Wasser, Schlamm usw.
Nachteile von Lineargebern
Begrenzte Erfassungsabstände (bei den meisten induktiven Sensoren 70 mm)
Externe Stromversorgung erforderlich
Geeignete Dewesoft-Eingänge
Die Zähler-/Encoder-Eingangsmodule von Dewesoft sind perfekt für digitale lineare Inkrementalgeber geeignet. Vollständige Details finden Sie weiter unten im Abschnitt zur Dewesoft SuperCounter®-Technologie.
Zahnradsensoren
Diese winkelbasierten Sensoren bestehen aus einem auf eine Motorwelle montierten Zahnrad sowie einem Näherungssensor, der so positioniert ist, dass die Verzahnung des Zahnrads beim Vorbeilaufen detektiert wird. Dies bietet eine Auflösung, die höher ist als die eines Näherungssensors, der nur einen Punkt pro voller Umdrehung einer Welle erfasst, aber nicht so hoch wie die eines Drehgebers, bei dem jeder Vollwinkel gewissermaßen Tausende von „Zähnen“ umfassen kann.
In der Regel handelt es sich bei dieser Art von Näherungssensor um Hall-Effekt-Sensoren, es gibt aber auch andere Typen. Zahnradsensoren sind ideal zum Messen von Motor- oder Maschinendrehzahlen. Sie entsprechen insofern Drehzahlmessern.

Ein Hall-Effekt-Näherungssensor erfasst die Veränderungen der Flussdichte im Luftspalt zwischen einem Magneten und der vorbeilaufenden Verzahnung eines eisenhaltigen Zahnrads. In modernen Datenerfassungssystemen wird das Signal in eine gegen Störeinflüsse unempfindliche binäre Rechteckwelle umgewandelt, die das Getriebe bis zum Stillstand verfolgen und sofort nach dem Einschalten den ersten vorbeilaufenden Zahn erkennen kann.
Es ist zu beachten, dass die meisten Hall-Sensoren nicht nur eine vorbeilaufende Verzahnung erfassen können, sondern auch Löcher in Scheiben und Platten, eisenhaltige Objekte (z. B. Bolzen) auf verschiedensten Scheiben und Platten sowie Kerben in Antriebs- und Nockenwellen.


Ein typischer Zahnradsensor hat 60 Zähne, wobei jeder Zahn 6° der 360°-Wellenumdrehung entspricht. Der Sensor gibt ein positives Rechtecksignal aus, wenn die Zähne vorbeilaufen. Aus dieser Zählung und der entsprechenden Impulsfolge kann ein gutes DAQ-System die Drehzahl ableiten.
Wir können jedoch weder den oberen Totpunkt noch irgendeinen anderen absoluten Referenzpunkt erfassen, da diese Verzahnungskonfiguration dafür keinerlei Bezugsmarke liefert. Mit anderen Worten: Wir können nicht wissen, welchen der 60 Zähne der Sensor zu einem bestimmten Zeitpunkt detektiert, und haben deshalb keine Möglichkeit, die Wellenposition zu bestimmen.
Bei Anwendungen, bei denen es erforderlich ist, den Winkel der Welle selbst zu kennen, müssen wir deshalb ein Zahnrad mit fehlenden Zähnen verwenden.
Zahnrad mit fehlenden Zähnen
Eine gängige Praxis ist die Verwendung eines Zahnradsensors, bei dem 2 der 60 Zähne fehlen. Diese Lücke wird verwendet, um den oberen Totpunkt bzw. Startpunkt der Welle zu erfassen, dessen Kenntnis für einige Anwendungen unerlässlich ist. Sensoren dieses Typs werden allgemein als „60-2-Sensoren“ bezeichnet.


ie beiden „fehlenden“ Zähne dienen dem Sensor dazu, die genaue Winkelstellung der Kurbelwelle zu erfassen. Die Zahnlücke kann in jedem beliebigen Winkel auf der Welle positioniert werden, zum Beispiel in der oberen Totpunktposition.

Beachten Sie, dass es auch Quadratur-Zahnradsensoren gibt, die um 90° zueinander phasenverschobene A- und B-Signale erzeugen. In Systemen, in denen sich die Welle im oder gegen den Uhrzeigersinn drehen kann, erfassen diese Sensortypen auch die Drehrichtung.
Anwendungen von Zahnradsensoren
Messung der Drehzahl an rotierenden Wellen
Motor-Verbrennungsanalyse
Studien zu Torsions- und Rotationsschwingungen
Vorteile von Zahnradsensoren
Üblicherweise sehr robust und strapazierfähig
Sehr niedrige Anschaffungs- und Betriebskosten
Nachteile von Zahnradsensoren
Schwierige Installation des Zahnrads bei einigen Systemen
Begrenzte Erfassungsabstände (bei den meisten induktiven Sensoren 70 mm)
Begrenzte Winkelauflösung im Vergleich zu Encodern, die die 360°-Umdrehung der Welle in Hunderte oder sogar Tausende von Positionen aufteilen können
Geeignete Dewesoft-Eingänge
Die Zähler-/Encodereingänge von Dewesoft sind perfekt für Zahnradsensor-Konfigurationen mit praktisch jeder Anzahl von Zähnen, mit oder ohne Lücke, sowie für Quadratur-Zahnradsensor-Konfigurationen geeignet. Vollständige Details finden Sie weiter unten im Abschnitt zur Dewesoft SuperCounter®-Technologie.
Optische Sensoren
Optische Sensoren bestehen aus einer Scheibe mit Löchern oder abwechselnd schwarzen und weißen Markierungen am Umfang oder einem an einer rotierenden Welle angebrachten Band. In unmittelbarer Nähe der Markierungen wird ein optischer Infrarotsensor montiert, der jedes Mal einen Impuls ausgibt, wenn ein Loch oder eine schwarze Markierung an ihm vorbeiläuft. Die Scheiben sind mit verschiedenen Auflösungen erhältlich. Eine Scheibe mit 360 Markierungen hätte zum Beispiel eine Auflösung von 1°.


Es gibt auch optische Bandsensoren, die aus einem optischen Sensor und einem Klebeband bestehen, auf das schwarze und weiße Streifen aufgedruckt sind. Das gestreifte Band wird um eine rotierende Welle gewickelt, auf die der optische Sensor gerichtet ist. Der Sensor erfasst das vom Band reflektierte Licht und kann so jede schwarze Markierung erkennen und in einen Ausgangsimpuls umwandeln.
Des Weiteren gibt es optische Tachometer, die sichtbares Licht auf ein rotierendes Rad oder eine rotierende Welle projizieren und die Reflexionen nutzen, um bestimmte Merkmale auf der Welle oder dem Rad zu zählen und so die Drehzahl zu berechnen. Bei den meisten dieser Geräte handelt es sich um Handgeräte, die eine Ablesung auf einem Display ermöglichen, aber kein elektrisches Ausgangssignal liefern, das aufgezeichnet werden kann.


Egal, ob es sich um eine scheiben- oder bandbasierte optische Sensorkonfiguration handelt, das Ergebnis ist im Prinzip das gleiche – wir erhalten ein Impulsausgangssignal, das wir in ein Datenerfassungssystem einspeisen können. Dewesoft hat einen Bandsensor namens DS-TACHO-4 mit einer Bandbreite von 100 kHz und einer praktischen einstellbaren Erkennungsschwelle im Sortiment.


Wenn Sie das Band um eine Welle wickeln, gibt es einen Übergangspunkt. Es ist möglich, an diesem Punkt schwarzes Band aufzukleben, um einen breiteren schwarzen Streifen zu erhalten. Diesen breiteren Streifen kann der optische Sensor als Bezugspunkt verwenden, so dass wir einen bekannten Winkel oder eine bekannte Position haben.


Anwendungen von optischen Sensoren
Messung der Drehzahl an rotierenden Wellen
Motor- oder Maschinenleistungsmessungen
Überwachung von Motordrehzahlen
Verbrennungsanalyse (Indiziermessung)
Torsionsschwingungsmessungen
Rotationsschwingungsmessungen
Vorteile von optischen Sensoren
Sehr zuverlässig, da sie nie mit den zu erfassenden Objekten in Kontakt kommen; praktisch verschleißfrei
Erkennung von Bezugspunkten (schwarzer Streifen mit doppelter oder dreifacher Breite)
Nachteile von optischen Sensoren
Begrenzte Erfassungsabstände (Bandsensoren üblicherweise ca. 2–5 mm)
Mögliche Beeinträchtigung der Lesbarkeit in manchen Umgebungen durch Verschmutzung der schwarz-weißen Markierungen auf dem Band
Mögliche Störung der Funktion des optischen Sensors durch Flüssigkeiten
Externe Stromversorgung erforderlich
Geeignete Dewesoft-Eingänge
Die Zähler-/Encoder-Eingangsmodule von Dewesoft sind perfekt für optische Sensoren aller Art geeignet. Vollständige Details finden Sie weiter unten im Abschnitt zur Dewesoft SuperCounter®-Technologie.
Digitalzähler
Was ist ein Digitalzähler?
Ein elektronischer Zähler ist eine digitale Eingangsschaltung, die die von Näherungssensoren, Encodern und ähnlichen Geräten erzeugten Impulse zählt. Digitale Zähler der einfachsten Art verfolgen und zählen Zeit und Impulse. Ähnlich wie Stoppuhren können sie zurückgesetzt werden und bis zu einem bestimmten Wert zählen.


Die einfachen Zähler, die von den meisten Herstellern angeboten werden, bieten in der Regel ausreichende Möglichkeiten, wenn sie allein eingesetzt werden. Als Teil eines Datenerfassungssystems, das gleichzeitig analoge Daten und vielleicht sogar zusätzliche Eingangssignale wie CAN-Bus-Daten, PMC-Daten, Video-Frames usw. misst, sind sie jedoch selten in der Lage, alle diese Signale zeitrichtig zu synchronisieren. Hier kommt die SuperCounter-Technologie von Dewesoft ins Spiel.
Die SuperCounter®-Technologie von Dewesoft
Dewesoft SuperCounter® ist mit einer breiten Palette an Drehgebern, Zahnradsensoren, Näherungssensoren usw. kompatibel. Dewesoft-Systeme wie SIRIUS, DEWE-43A, MINITAURs, KRYPTON usw. können mit einem oder mehreren SuperCounter-Eingängen konfiguriert werden. Sie werden normalerweise mit einem robusten verriegelbaren LEMO-Stecker geliefert, bei einigen Modellen gibt es aber auch andere Anschlussmöglichkeiten.


Es gibt üblicherweise drei Eingänge, da Encoder dies (wie weiter unten beschrieben) so erfordern. Wenn Sie diskrete Eingangssignale (TTL-Ein-/Aus-Signale) messen möchten, können Sie diese drei Eingänge statt für Zähler als unabhängige diskrete Eingänge verwenden. Des Weiteren stehen zwei Sensorversorgungsspannungen (+12 V und +5 V), ein digitaler Ausgang (wird in einem anderen Artikel besprochen) und ein Masseanschluss zur Verfügung.
Die Eingänge haben TTL-Pegel, was bedeutet, dass ihr Low-Zustand unter 0,8 V und ihr High-Zustand über 2 V (bis zu 5 V) liegen muss. Schauen wir uns die elektronischen Spezifikationen für SIRIUS-Zählereingänge einmal etwas genauer an:
| SuperCounter®-Eingänge | / |
|---|---|
| Zeitbasis | 102.4MHz |
| Zeitbasisgenauigkeit, typisch | 5 ppm, Max: 20 ppm |
| Max. Bandbreite | 10MHz |
| Eingangsfilter | 500 ns, 1μs, 2μs, 4μs, 5μs and 7.5μs |
| Eingangspegel-Kompatibilität | TTL (Low: <0.8, High > 2V) |
| Eingangsimpedanz | 100kΩ pull-up to +3.3V |
| Eingangsschutz | kontinuierlich bis ±25 Volt |
| Alarmausgang | Open collector, max. 100mA/30Volt |
| Sensorversorgung | 5V/100mA;12V/50mA |
Bevor wir uns mit allen Betriebsarten der digitalen Eingänge beschäftigen und damit, wie Sie diese nutzen können, sollten wir einen sehr wichtigen Aspekt betrachten, der die SuperCounter so besonders macht – und zwar die genaue Synchronisation der Zählerdaten mit den analogen und anderen Daten.
Synchronisation von Zählerdaten mit analogen Daten
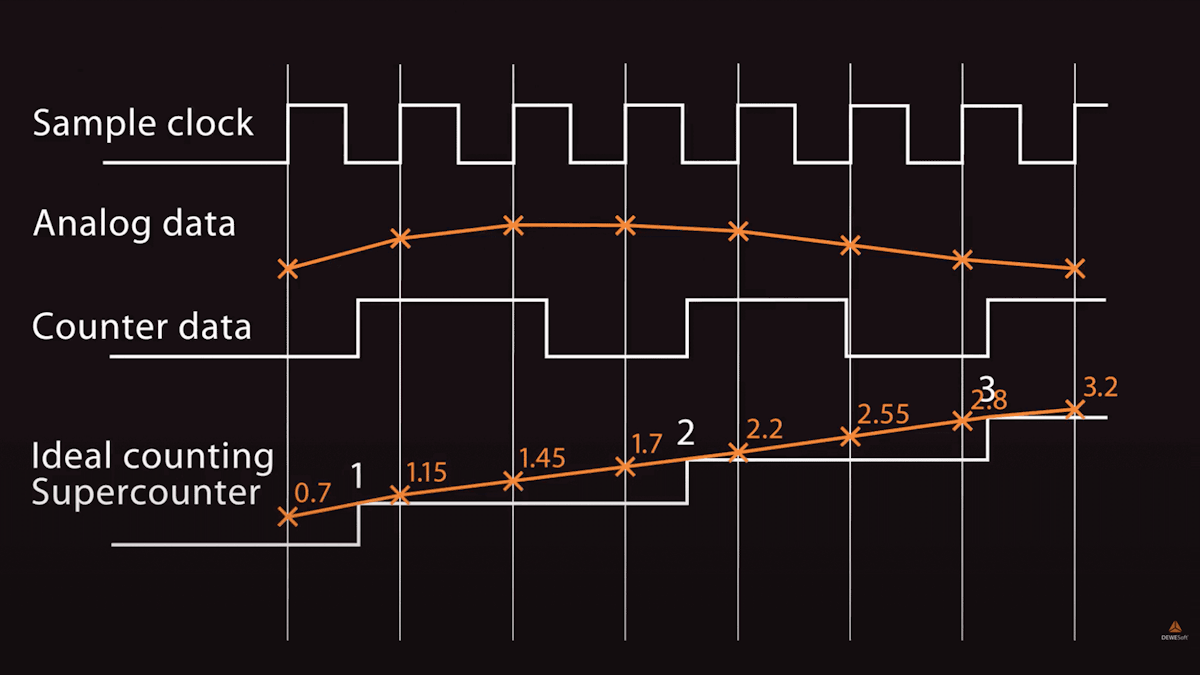
Die heute in den meisten DAQ-Systemen verfügbaren Standardzähler liefern nur Werte mit Integer-Auflösung (z. B. 1, 1, 2, 2). Infolgedessen sind ihre Ausgangssignale gegenüber den analogen Sensordaten immer um ein Sample verzögert. Dies kann bei Anwendungen wie Rotations- oder Torsionsschwingungen, wo eine Phasenverschiebung oder ein einzelner Abtastwert die Ergebnisse verändern kann, ein echtes Problem darstellen.
SuperCounter lösen dieses Problem vollständig, indem sie Fließkommazahlen wie 1,37; 1,87; 2,37 ... extrahieren und diese dann zeitgenau mit den restlichen Daten synchronisieren. Tatsächlich ist ein SuperCounter zwei Zähler in einem. Das Eingangssignal wird parallel in beide Zähler eingespeist, und der Unterzähler misst die genaue Zeit der steigenden Signalflanke. So wird der tatsächliche Zählerwert in Bezug auf die Analogwerte berechnet und perfekt synchronisiert.

 einen kontinuierlichen Winkelverlauf")
Das Video unten zeigt, wie die SuperCounter-Technologie Zählersignale misst, die vollständig mit den analogen Kanälen synchronisiert sind. Dieses Video enthält einen realen Vergleich zwischen dem normalen Zählmodus und dem SuperCounter-Modus.
Andere Datenquellen (wie CAN-Bus, XCP, Video usw.) werden in allen Dewesoft DAQ Systemen ebenfalls mit den analogen Daten synchronisiert.
Das andere „Geheimnis“ hinter dieser Technik ist, dass die SuperCounter von Dewesoft auf einer Zeitbasis von 102,4 MHz arbeiten, die nicht nur unabhängig von der analogen Abtastrate, sondern auch viel höher als diese ist.


Die Isolation ist im digitalen Bereich genauso wichtig wie im analogen Bereich. Rauschen in digitalen Leitungen kann leicht mit realen Ereignissen verwechselt und somit zu fehlerhaften Zählungen führen. Aus diesem Grund bietet Dewesoft DAQ Hardware eine robuste galvanische Trennung auf allen digitalen und Zählerleitungseingängen.
Die Bedeutung der Filterung
In der realen Welt sind Rauschen und Glitches an den Zählerausgängen keine Seltenheit. Das Problem ist, dass Glitches mit ausreichend hoher Amplitude als Impulse gezählt werden können, was zu falschen Messwerten führt. Die Dewesoft SuperCounter-Technologie bietet eine erweiterte Eingangsfilterung, die eingesetzt werden kann, um das Problem zu mildern, genau wie es im analogen Bereich geschieht.
In der Grafik unten können Sie sehen, dass es sich beim zweiten roten Impuls tatsächlich um einen Glitch handelt, der aber groß genug ist, um als Impuls gezählt zu werden (siehe der blaue Schritt direkt darunter – das Ausgangssignal des Ereigniszählers).


In der DAQ Software DewesoftX können Sie Filter zwischen 100 ns und 5 μs auswählen. Es gibt einen ausgezeichneten Schulungskurs zur Berechnung des passenden Filterwertes.
Betriebsarten
Mit diesen digitalen SuperCounter-Eingängen haben Sie viele Möglichkeiten. Die SuperCounter-Hardware ist eng mit der Datenerfassungssoftware Dewesoft X integriert und bietet Zugriff auf eine breite Auswahl an Funktionen:
Ereigniszählmodus (einfach, torgesteuert, Auf/Ab, einfache Encoder-Zählung)
Sensor-Modus (Drehgeber, Tacho, CDM, 60-2, ...)
Wellenform-Timing-Modus (Periode, Pulsbreite, Tastgrad)
Schauen wir uns nun auch diese Modi und ihre Anwendung auf die in den vorherigen Abschnitten dieses Artikels beschriebenen Sensoren einmal etwas genauer an:
Ereigniszählmodus
Im Ereigniszählmodus bietet die Software Dewesoft X mehrere Möglichkeiten, die Impulse eines eingehenden Impulsstroms zu zählen, darunter:
einfache Zählung
torgesteuerte Zählung
Auf-/Ab-Zählung
einfache Encoder-Zählung
Einfache Zählung
Im einfachen Ereigniszählmodus können wir entweder fallende oder steigende Signalflanken zählen. Man braucht das Signal nur mit einem der Zählereingänge und Masse zu verbinden.


Wählen Sie in der Software die Anwendung „Event counting“ und dann den Modus „Basic event counting“. Lassen Sie die Software jetzt einfach wissen, an welchem Eingangspin Sie das Signal angeschlossen haben. Sie können wählen, ob das System AUFWÄRTS oder ABWÄRTS zählen soll, und es gibt ein Kontrollkästchen, um die Zählung beim Start der Messung zurückzusetzen oder nicht.


Torgesteuerte Zählung
Im torgesteuerten Zählmodus (Gated Counting) wird nur dann ein Impuls gezählt, wenn ein torgesteuertes Signal „high“ ist. Dazu wird das Impulssignal selbst mit dem Eingang IN0 (und mit Masse) verbunden und ein zweites Signal mit dem Eingang IN1, um als Torsignal zu dienen.


Es ist zu beachten, dass für beide Eingänge ein INV-Kontrollkästchen (invertieren) vorhanden sind. Das ist wichtig, damit Sie die richtige Polarität Ihrer Signale einstellen können. Ist das Torsignal (Gate) zum Beispiel standardmäßig „high“, Sie benötigen es aber standardmäßig „low“, dann können Sie im Kästchen INV neben der Gate-Signal-Auswahlbox das Häkchen setzen.


Auf-/Ab-Zählung
Der Auf-/Ab-Zählmodus ähnelt dem oben beschriebenen torgesteuerten Zählmodus, mit der Ausnahme, dass das Torsignal hier dazu verwendet wird, zu steuern, ob wir aufwärts oder abwärts zählen. Wenn das Torsignal „high“ ist und ein Impuls erfolgt, zählen wir AUFWÄRTS, ist das Torsignal „low“ und es erfolgt ein Impuls, dann zählen wir ABWÄRTS.


Die Konfiguration ist die gleiche wie beim torgesteuerten Zählmodus. Und wie immer gibt es die Möglichkeiten zur Filterung, zum Zurücksetzen zu Beginn der Messung und zur INV-Kontrolle.

Einfache Encoder-Zählung
Im einfachen Encoder-Zählmodus können wir praktisch jeden heute erhältlichen inkrementalen Drehgeber auf sehr flexible und intuitive Weise konfigurieren.


Dazu wählen Sie zunächst einfach oben links auf dem Zähler-Konfigurationsbildschirm in DewesoftX den Encoder-Modus aus (siehe Screenshot). Wie bei den anderen Modi sollten auch hier in der Mitte des Bildschirms die Eingänge für Signal A und Signal B (normalerweise IN0 bzw. IN1) angegeben werden.
Beachten Sie, dass Sie im Kästchen „Encoder Zero“ oben rechts auf dem Bildschirm ein Häkchen setzen müssen, wenn Sie den Z-Ausgang (Nullposition) des Encoders verwenden wollen. Wenn Sie dies tun, wird unter dem Dropdown-Menü-Feldern für Signal A und Signal B ein weiteres Feld für die Auswahl der für das Nullsignal verwendeten Eingangsleitung angezeigt:
Dabei handelt es sich normalerweise um IN2.
Was für ein Ausgangssignal soll der Encoder erzeugen?
Im unteren Bildschirmbereich können Sie die Ausgabeeinheit des Winkel-Kanals einstellen (inkrementeller Zählwert, Anzahl der Umdrehungen oder Grad). Im obigen Screenshot haben wir REVS (Umdrehungen) gewählt.
Falls gewünscht können Sie auch einen Skalierungsfaktor eingeben. Die Standardwerte für x und b sind, wie oben gezeigt, 1 und 0. Es handelt sich um eine einfache lineare y = mx + b-Skalierungsmethode.
Dabei gilt:
x = der Skalierungsmultiplikator (kann ein Fließkomma- oder ganzzahliger Wert sein; 1 = kein Multiplikator)
b = der Offset (kann positiv oder negativ sein; 0 = kein Offset)
Für den Ausgabe-Frequenz-Kanal können RPM (Umdrehungen pro Minute) oder Hz als Einheit gewählt werden.
Wenden wir uns nun wieder der oberen rechten Bildschirmecke zu. Wir müssen der Software mitteilen, wie viele Impulse pro Umdrehung (Auflösung) geliefert werden sollen. In unserem Beispiel sind das 360, also ein Impuls pro Grad der Umdrehung. Sie sollten hier die für Ihren Drehgeber passende Auflösung eingeben (er ist normalerweise direkt auf dem Sensor angegeben).
Als nächstes können Sie den Encoder-Modus einstellen. Dabei stehen X1, X2 und X4 für Folgendes:
X1-Modus – In diesem Standardmodus wird an der steigenden Flanke von Signal A gezählt.
X2-Modus - In diesem Modus zählt der Zähler an der steigenden UND an der fallenden Flanke von Signal A, so dass sich die Auflösung um den Faktor 2 erhöht. Alles andere bleibt gleich.
X4-Modus - In diesem Modus wird an der steigenden UND der fallenden Flanke von Signal A UND von Signal B gezählt, so dass sich die Auflösung um den Faktor 4 erhöht. Alles andere bleibt gleich.
Der Zweck der Modi X2 und X4 ist es, eine höhere Auflösung vom Encoder zu erhalten. Sie sollten jedoch mit Vorsicht verwendet werden, da sich Messfehler durch mechanischen Jitter ergeben können, wenn der Tastgrad nicht genau 50 % beträgt oder die Signalspuren A und B im X4-Modus nicht präzise synchronisiert sind.
Es soll erwähnt sein, dass es Drehgeber gibt, deren Auflösung viel höher ist als 360 Impulse pro Umdrehung, so dass Techniker den Sensor flexibel an die Messanforderungen anpassen können.
Sensormodus
Im Sensormodus konfigurieren Sie den Zähler für bestimmte Sensoren, wie
Encoder,
Tachometer,
Widerstandsthermometer (CDM),
60-2-Sensoren
oder andere.
Natürlich können Sie all dies mit den in den vorhergehenden Abschnitten beschriebenen Methoden auch manuell konfigurieren, die Software Dewesoft X umfasst aber eine Sensordatenbank, in der Sie Ihre spezifischen Sensoren einrichten, bearbeiten und wiederverwenden können, was die Konfiguration vereinfacht und beschleunigt. Warum bei Null anfangen, wenn Sie den gleichen Drehgeber oder Näherungssensor einsetzen, den Sie schon vor ein paar Tagen verwendet haben? Mit ein paar einfachen Schritten können Sie jeden beliebigen Sensor zu Ihrer Datenbank hinzufügen. Wenn Sie dann bei der nächsten Verwendung einfach seinen Namen auswählen, wird er in null Komma nichts in der Software eingerichtet.
Wellenform-Timing-Modus
Im Wellenform-Timing-Modus kann die DAQ Software DewesoftX aus jedem eingehenden Impulsstrom diverse nützliche Ausgangssignale berechnen, darunter
Periode,
Pulsbreite und
Tastgrad.


Diskreter digitaler Eingangsmodus
Jeder Zähler hat drei Eingänge, die frei als diskrete digitale Eingänge (statt als Zähler) verwendet werden können. In diesem Fall verwenden Sie nicht das Zählermodul, sondern richten in der DAQ Software DewesoftX einen oder mehrere digitale Eingänge ein.
Dazu brauchen Sie diese Digitaleingänge tatsächlich nur auf dem Software-Konfigurationsbildschirm zu aktivieren.


Eine Konfiguration ist praktisch nicht erforderlich, da die Eingangssignale nur 0 oder 1 sein können und keine anderen Werte möglich sind. Der Kanalname, die Farbe und die technischen Einheiten (EU) können eingestellt werden.
Dann weisen Sie diese digitalen Eingänge auf den Bildschirmen einfach den gewünschten optischen Anzeigen zu. Diese Kanäle werden zusammen mit den anderen Daten gespeichert. So einfach ist das.
Um noch weiter zu gehen, können Sie diese diskreten Werte in Mathematikformel-Kanälen oder als Eingangssignale für einen oder mehrere Triggerkanäle verwenden, die dann gestartet und/oder aufgezeichnet werden.
DAQ-Systeme von Dewesoft mit digitalen Eingängen
SIRIUS-Datenerfassungssysteme
Für die meisten SIRIUS DAQ Module stehen optionale SuperCounter-Eingänge zur Verfügung. Da jedes SIRIUS-Modul acht analoge Eingangskanäle besitzt, ist es möglich, sie mit bis zu 8 Zählern pro Modul zu konfigurieren (abhängig davon, welche analogen Eingangsanschlüsse verwendet werden).


SIRIUS Standard-Eingangsmodule
| Modul | STG | STGM | ACC | CHG | HV | LV |
|---|---|---|---|---|---|---|
| ähler-Ausführung? | √ | √ | √ | √ | X | √ |
SIRIUS HS High-Speed-Eingangsmodule
| Modul | STG | ACC | CHG | HV | LV |
|---|---|---|---|---|---|
| Counter version? | √ | √ | √ | X | √ |
Hinweis: SIRIUS-HD-Module können aus Platzgründen nicht mit SuperCounter-Eingängen ausgestattet werden.
Für Anwendungen mit zahlreichen diskreten Eingangssignalen besitzt das Modul SIRIUS STGM-DB einen zusätzlichen DSUB-37-Stecker, der 24 dedizierte digitale Eingänge bietet. Diese 24 Eingänge können alternativ auch für 8 Zähler/Encoder-Sensoren verwendet werden.
Datenerfassungssystem DEWE-43A
Das DEWE-43A ist ein tragbares 8-Kanal-Messsystem, das standardmäßig acht SuperCounter bereitstellt. Diese Zähler sind voneinander unabhängig und können alternativ auch für je drei diskrete Eingangssignale verwendet werden. Jedes DEWE-43A-System umfasst die preisgekrönte Software DewesoftX für die komplette Konfiguration und Bedienung des Systems, die Anzeige, Speicherung und Analyse der Daten und die Erstellung von Berichten.


KRYPTON-Datenerfassungssysteme
KRYPTON und KRYPTON ONE sind extrem robuste DAQ-Module, die in Schutzart IP67 ausgeführt und somit für den Betrieb in rauen Umgebungen mit Erschütterungen, Vibrationen, und extrem hohen und niedrigen Temperaturen geeignet sind. Jedes KRYPTON-Datenerfassungssystem umfasst die preisgekrönte Software DewesoftX für die komplette Konfiguration und Bedienung des Systems, die Anzeige, Speicherung und Analyse der Daten und die Erstellung von Berichten.


Robuste KRYPTON- und KRYPTON-1-Digitaleingangsmodule
| Modul | Zählereingänge | Diskrete Eingänge | Diskrete Ausgänge | Eingangsdatenrate | Ausgangsdatenrate |
|---|---|---|---|---|---|
| KRYPTON 4xDI | - | 4 | - | 40 kS/s/ch | N/A |
| KRYPTON-4xDO | - | - | 4 | N/A | Siehe Hinweis |
| KRYPTON-1xCNT | 1 | - | - | 10 MHz | 20 kS/s/ch |
| KRYPTONi-16xDI | - | 16 | - | 20 kS/s/ch | N/A |
| KRYPTONi-8xDI-8xDO | - | 8 | 8 | 20 kS/s/ch | Siehe Hinweis |
| KRYPTONi-16xDO | - | - | 16 | 20 kS/s/ch | Siehe Hinweis |
Hinweis: Die Ausgangsdatenraten hängen vom gewählten EtherCAT-Master ab.
IOLITE-Datenerfassungssysteme
Die IOLITE DAQ Systeme von Dewesoft verfügen über ein 32-kanaliges Digital-Eingangsmodul. Das Modell 32xDI mit einfachem Schraubklemmenanschluss und Sensorstromversorgung ist ideal für Datenerfassungs- und Steueranwendungen mit hoher Kanalzahl.


IOLITE kombiniert eine leistungsfähige Datenerfassung mit einer Echtzeitsteuerung über zwei EtherCAT-Schnittstellen. Es wird in einem rackkompatiblen 19"-Gehäuse oder in Benchtop-Ausfûhrung angeboten. Für IOLITE sind die in der folgenden Tabelle aufgeführten digitalen Eingangs- und Ausgangsmodule erhältlich. Jedes IOLITE-System umfasst die preisgekrönte Software Dewesoft X für die komplette Konfiguration und Bedienung des Systems, die Anzeige, Speicherung und Analyse der Daten und die Erstellung von Berichten.
IOLITE Digitale Eingangs-/Ausgangsmodule
| Modul | Diskrete Eingänge | Diskrete Ausgänge | Eingangsdatenrate | Ausgangsdatenrate |
|---|---|---|---|---|
| IOLITE-32-DI | 32 | - | 40 kS/s/Kanal | N/A |
| IOLITE-32-DO | - | 32 | N/A | Siehe Hinweis |
Hinweis: Die DO-Ausgangsdatenraten hängen vom EtherCAT-Master ab.