




Vergleich und Bewertung der Genauigkeit, des Wirkungsgrads und der thermischen Stabilität von Servomotoren
Anamarija Hauptman
University of Ljubljana
September 5, 2025
Servomotoren sind in Automatisierung, Robotik und Präzisionssteuerungssystemen, in denen Genauigkeit, Wirkungsgrad und Langlebigkeit von entscheidender Bedeutung sind, unverzichtbar. An der Universität Ljubljana verglich ich vier gängige Servomotoren mithilfe von Hardware und Software von Dewesoft unter Last- und Leerlaufbedingungen. Durch die Messung der Rotationspräzision, des Temperaturanstiegs und der Leistungsaufnahme konnte ich den für anspruchsvolle ingenieurtechnische Anwendungen am besten geeigneten Motor identifizieren.
Mein Projekt begann mit der Konzeption eines humanoiden Roboterkopfes, bei der die Auswahl geeigneter Komponenten einen entscheidenden ersten Schritt darstellt. Servomotoren finden in zahlreichen Bereichen Anwendung, darunter Automatisierungssysteme, Mechatronik, Roboterarme, ferngesteuerte Fahrzeuge und sogar Bildungsplattformen.
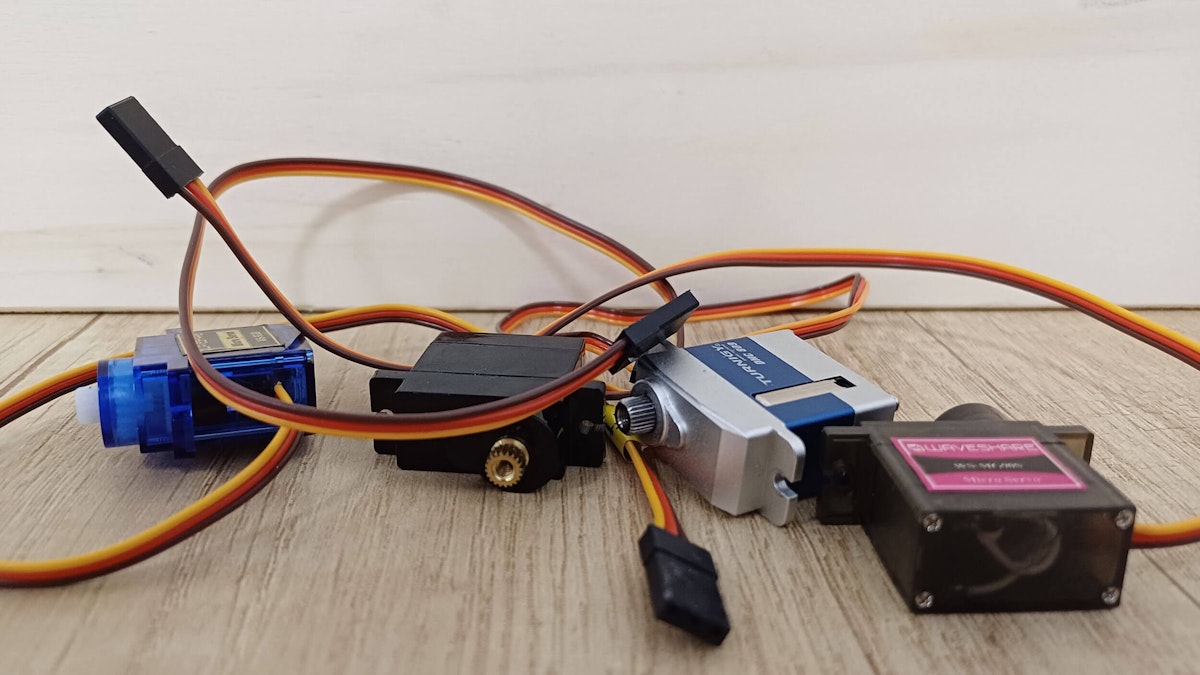
Da Motoren zentrale Elemente darstellen, wenn es darum geht, Bewegungen einzelner Segmente zu ermöglichen, testete ich vier handelsübliche Servomotoren (siehe Abb. 1), um ihre Leistungsmerkmale sowohl unter Last als auch im Leerlauf zu bewerten.
Ich verwendete hochpräzise Messtechnik und Software von Dewesoft zur Erfassung ihrer Rotationsgenauigkeit, ihres thermischen Verhaltens und ihres elektrischen Energieverbrauchs. Diese Parameter sind entscheidend für die Beurteilung der Eignung der Motoren in Bezug auf Wirkungsgrad, thermische Stabilität und Steuerpräzision.
Verglichen wurden die folgenden Servomotoren (von links nach rechts):
Turnigy DMC 809
Waveshare WS-MG90S
Waveshare WS-SG90
Dsservo 9g mg




Messkette und Messverfahren
Alle zwölf verwendeten Sensoren (je drei pro Motor) wurden an Krypton-Module von Dewesoft angeschlossen. Diese Datenerfassungsmodule sind gut für verteilte Messungen geeignet, da sie die Datenerfassung näher an die Sensoren verlagern. Wie alle anderen Datenerfassungssysteme von Dewesoft werden auch Krypton-Module mit der Datenerfassungssoftware DewesoftX geliefert.
Für mein Projekt nutzte ich drei miteinander verbundene Krypton-Module (siehe Abb. 2), von denen zwei mit je 6 STG-Eingängen ausgestattet waren, an die ich Adapter zur Strommessung sowie die Encoder anschloss. Das dritte Modul besaß 16 TH-Eingänge, an die ich Thermoelemente anschloss


Zur Erfassung des Rotationswinkels verwendete ich einen Hall-Winkelsensor des Typs Kalamoyi P3022-V1-CW360 (siehe Abb. 3). Dieser Sensor, den ich an das KRYPTON-6xSTG-Datenerfassungsmodul anschloss, arbeitet nach dem Prinzip der magnetischen Felderkennung und verfügt über einen analogen Spannungsausgang, der proportional zur Winkelposition ist. Abb. 4 zeigt die Verdrahtung des Encoders und des STG-Adapters.



Zur Messung des elektrischen Stroms jedes Motors verwendete ich einen DSIi-10A Adapter von Dewesoft (Abb. 5). Der Messbereich des Adapters beträgt bis zu 10 A, die Versorgungsspannung 5 V. Der Prüfling wird über zwei Bananenstecker mit dem Adapter verbunden, der seinerseits über den STG-Eingang an das Krypton-Modul angeschlossen ist.

Die Temperatur der Motoren wurde mit Typ-K-Thermoelementen (Abb. 6) erfasst, die im Temperaturbereich von −270 °C bis 400 °C arbeiten.

Zur Ansteuerung der Motoren während der Tests nutzte ich den USB-Servocontroller Mini Maestro 24-Channel vom Pololu (Abb. 7), der die gleichzeitige Steuerung von bis zu 24 Servomotoren ermöglicht. Über die Software Pololu Maestro Control Center konnte ich die entsprechenden Befehle an die einzelnen Kanäle senden.
Abb. 8 zeigt die Verdrahtung der einzelnen Komponenten.

Die vollständige Messkette umfasst drei Messgeräte, einen Servocontroller, einen Laptop, vier Servomotoren sowie jeweils einen Encoder, ein Thermoelement und einen Strommessadapter pro Motor.
Die Messgeräte wurden hintereinander verkettet und mit einer Versorgungsspannung von 24 V betrieben. Die Spannungsversorgung erfolgte über ein Netzgerät vom Typ Axiomet AX-3005DS 0–30 V / 0–5 A. Die Geräte kommunizierten über eine Ethernet-RJ45-Verbindung und die Software DewesoftX mit dem Computer.
Der Servocontroller wurde über ein Netzteil vom Typ HDR-60-5 mit einer Ausgangsspannung von 5 V versorgt und kommunizierte über USB und eine geeignete Software mit dem Computer.


Die Messungen wurden in zwei Phasen durchgeführt. In der ersten Phase liefen die Motoren eine Stunde lang ohne externe Last, in der zweiten wurden sie für die gleiche Dauer mit einem Drehmoment von 0,083 Nm belastet. Die Last wurde über eine Kupplung aufgebracht, indem die Motorwelle und die Encoderwelle verbunden wurden. An der Kupplung wurde das entsprechende Gewicht befestigt. Während des Tests wurde den Motoren eine zyklische Referenz-Drehposition von −90° bis 90° vorgegeben.
Vor der Aufzeichnung der Messwerte ließ ich die Motoren mit der Hälfte ihres maximalen Drehmoments einlaufen. Dabei fiel der Waveshare-Motor vom Typ WS-MG90S nach etwa 15 Minuten aus und wurde daher sofort aus dem Vergleich ausgeschlossen.
Ergebnisse
Wie bereits erwähnt, wurden die Motoren hinsichtlich Rotationswinkel, elektrischem Strom und Motortemperatur verglichen.
Die Diagramme in Abb. 9 zeigen die Temperaturverläufe der Motoren über die Zeit bei belastetem und unbelastetem Betrieb. Im Lasttest erreichte der Waveshare WS-SG90 Temperaturen von über 40 °C und erwärmte sich damit am stärksten. Im Leerlauftest erwärmten sich der Waveshare WS-SG90 und der Dsservo 9g mg etwa gleich stark. Der Turnigy DMC 809 wies unter beiden Bedingungen die geringste Erwärmung auf.


Die Encoderauflösung beträgt 0,0142 V/°. Abb. 10 zeigt die Winkelabweichung der Motoren von der Referenzposition ±90° während jeder Rotation.
Im Leerlauf traten beim Waveshare WS-SG90 die größten Abweichungen auf, während der Turnigy DMC 809 die konsistentesten Rotationen lieferte. Auch unter Last – insbesondere beim Absenken des Gewichts – zeigte der Waveshare WS-SG90 die größten Abweichungen, während der Turnigy DMC 809 – vor allem beim Heben des Gewichts – die konsistenteste Rotation aufwies.


Die Messung der Innenwiderstände der einzelnen Motoren ergab folgende Werte:
Turnigy DMC 809: R = 17,9 kΩ
Waveshare WS-SG90: R = 18,0 kΩ
Dsservo 9g mg: R = 17,7 kΩ
Ich berechnete die durchschnittliche elektrische Leistungsaufnahme der Motoren für jede Rotation. Abb. 11 zeigt die entsprechenden Verläufe. Sowohl im Leerlauf als auch im Lastbetrieb zeigte der Waveshare WS-SG90 den höchsten, der Turnigy DMC 809 die niedrigste Leistungsaufnahme.


Fazit
Unsere Messungen identifizierten zwar klar den leistungsfähigsten Motor, jedoch wies der Versuchsaufbau auch einige Einschränkungen auf. So wurde die Temperatur am Motorgehäuse erfasst, was die tatsächliche Wicklungstemperatur möglicherweise nicht vollständig widerspiegelt. Dies ließe sich verbessern, indem die Thermoelemente nach Entfernen des Gehäuses direkt am Motor angebracht werden. Analog könnte auch die Belastungsmethode optimiert werden: Obwohl Strom und Leistung genau gemessen wurden, ließe sich durch die Verwendung kalibrierter Gewichte anstelle von Wasserflaschen eine Verbesserung erzielen.
Trotz dieser Optimierungsmöglichkeiten lässt sich aus den Ergebnissen schließen, dass der Turnigy DMC 809 der beste der getesteten Motoren ist, da er in allen sechs Messgrößen-Kategorien die konstanteste Leistung aufwies. Konkret zeigte er sowohl unter Last als auch im Leerlauf den geringsten Temperaturanstieg, die kleinsten Abweichungen von den Referenzwinkeln und die niedrigste elektrische Leistungsaufnahme.
Der Waveshare WS-SG90 hingegen wies die größten Rotationsungenauigkeiten und – insbesondere unter Last – die höchste Leistungsaufnahme auf. Dies deutet darauf hin, dass er eher für leichte Hobbyanwendungen geeignet ist als für Aufgaben mit hohen Anforderungen an Präzision und Langlebigkeit.