




Korrelation von Reibgeräuschen und Modenkopplungsinstabilität in Hochleistungs-Bremsmaterialien
Daniele Limiti (student)
University of Rome La Sapienza
October 17, 2023
In der Bremsbelag- und Bremssystemindustrie wird instabilen reibungsinduzierten Schwingungen große Bedeutung beigemessen. Diese Phänomene führen zu Oberflächenverschleiß, beeinträchtigen die Bremsleistung und verursachen Geräusche wie Bremsenquietschen. Mithilfe von Dewesoft-Technologie untersuchte ich die Korrelation zwischen Kontaktinstabilitäten bzw. Modenkopplung und der aus dem Reibkontakt resultierenden dynamischen Anregung.
Reibungsinduzierte Schwingungen
Reibkontakte sind durch eine Abfolge von Mikrostößen und lokalen Kontaktablösungen gekennzeichnet, die zur Freisetzung elastischer Energie in Form akustischer Wellen im Kontaktbereich führen (siehe Abb. 1). Diese Phänomene resultieren in einer verteilten lokalen dynamischen Anregung des Systems.


Ein trockener Gleitkontakt stellt grundsätzlich eine Quelle von (reibungsinduzierten) Schwingungen dar, bei denen elastische Energie in Form von Wellen freigesetzt wird, die sich sowohl in der Umgebung als auch im System selbst ausbreiten. Das System zeigt eine inhärente dynamische Antwort auf diese Anregungen, die sich in verschiedenen Verhaltensweisen äußern kann:
Stabile reibungsinduzierte Schwingungen: Das System reagiert mit seinen Eigenfrequenzen, wobei die dynamische Antwort stabil bleibt. Die akustische Energie wird durch Material- und Verbindungsdämpfung allmählich dissipiert.
Instabile reibungsinduzierte Schwingungen: In diesem Fall reagiert das System mit einer dynamischen Instabilität, die zu Schwingungen großer Amplitude führt. Die wichtigsten makroskopischen Instabilitätstypen sind:
Stick-Slip-Instabilität: Gekennzeichnet durch abwechselnde Phasen makroskopischen Haftens und Gleitens, wobei die Übergänge mit impulsartigen Systemanregungen einhergehen.
Modale Instabilität: Führt durch Energieeinspeisung zur Instabilisierung einer Systemmode und zu harmonischen Schwingungen, deren Amplitude exponentiell anwächst, bis ein durch Kontakt-Nichtlinearitäten vorgegebener Grenzzyklus erreicht wird, der erhebliche Geräuschemissionen verursacht.
Modenkopplungsinstabilität
Ziel dieses Forschungsprojekts ist es, die Korrelation zwischen der dynamischen Kontaktanregung, Reibgeräuschen und dem Auftreten einer Modenkopplungsinstabilität zu untersuchen.
Das Verständnis der flüchtigen Merkmale solcher instabilen Schwingungen ist notwendig, um ihr Auftreten zu kontrollieren und zu vermeiden. Sie stellen für Automobilbremsenhersteller ein Problem dar und gelten allgemein als zentrales Phänomen hinter dem Bremsenquietschen (siehe Abb. 2).
Instabile Schwingungen entstehen durch die Koaleszenz zweier Systemmoden bei einem bestimmten Wert des Reibungskoeffizienten, also des Verhältnisses zwischen Reibkraft und Normalkraft. Der Realteil des Eigenwerts wird positiv, was einem scheinbar negativen Wert der entsprechenden modalen Dämpfung entspricht. Dieses Phänomen führt zu selbsterregten Schwingungen, die exponentiell anwachsen, bis ein Grenzzyklus erreicht ist und Schall abgestrahlt wird.

 und Realteil (b) der Eigenwerte, entsprechend der Schwingungsfrequenz bzw. der Wachstumsrate, als Funktion des Reibungskoeffizienten")




Bei den Versuchsreihen zur Charakterisierung des Reibungs- und Dynamikverhaltens der Prüflinge kamen Dewesoft-Technologien zum Einsatz. Die untersuchten Materialien stammten aus realen Bremssystemen, bestehend aus Bremsbelägen und Bremsscheiben aus Kohlenstoff-Kohlenstoff-Verbundwerkstoff (C/C), einem Hochleistungswerkstoff, der in der Automobilindustrie zunehmend Anwendung findet.
Für die Datenerfassung waren eine hohe Messauflösung sowie ein breiter Frequenz- und Amplitudenbereich der Schwingungen erforderlich, einschließlich hochharmonischer Anteile und niederamplitudiger Reibgeräusche. Aus diesem Grund entschied ich mich für ein Sirius-Dual-Core-Datenerfassungssystem in Kombination mit der Datenerfassungs- und Signalverarbeitungssoftware DewesoftX.
Versuchsaufbau
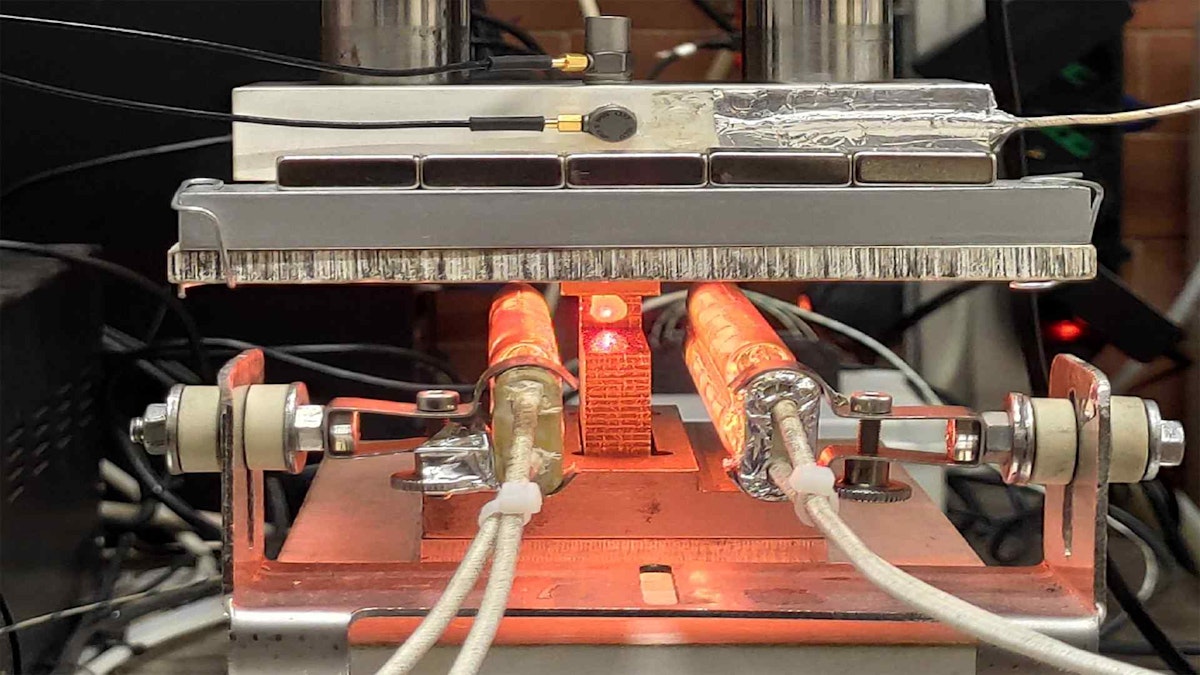
Für die Analyse wurde ein spezieller Prüfstand – der TriboAir – verwendet, der die Kontrolle der Kontakt-Randbedingungen sowie die Vermeidung parasitärer Schwingungen aus anderen Kontakten im Versuchsaufbau ermöglicht.
Der TriboAir-Prüfstand (siehe Abb. 3) befindet sich in den Tribologie-Laboren des Fachbereichs Maschinenbau und Luft- und Raumfahrttechnik der Universität La Sapienza in Rom.
Der Aufbau ist so konzipiert, dass mittels eines Systems mit luftgelagerten beweglichen Komponenten eine Reibgleitbewegung realisiert wird. Auf diese Weise werden Schwingungen ausschließlich vom untersuchten Kontakt erzeugt, wodurch präzise und störungsfreie Messungen des Reibungs- und Dynamikverhaltens des Systems möglich sind.






Zur Analyse des Einflusses der einzelnen Parameter wurden grundlegende Prinzipien der Dynamik und Geometrie angewendet. Hierzu wurden kleine Prüflinge auf einer Lastaufnahme und einem Gleitgestell montiert. Der bewegliche Träger wurde mittels eines linearen Voice-Coil-Aktuators (Tauchspule) des Typs BEI Kimco LA30-75-001A und eines programmierbaren Reglers angesteuert.
Die Luftlager ermöglichten eine vollständige Isolation des untersuchten Kontakts von parasitären Umweltschwingungen, die andernfalls die Messungen verfälscht hätten. Aus demselben Grund wurde zur gesicherten Vermeidung zusätzlicher Kontaktstellen ein magnetischer Aktuator eingesetzt.
Zwei an der beweglichen Basis befestigte Infrarotlampen dienten der Temperaturkontrolle im Bereich der Kontaktfläche. Die Temperaturregelung erfolgte mittels eines Thermoelements, das im unteren Prüfling direkt unterhalb der Kontaktfläche positioniert war. Das Temperaturprofil wurde durch einen PID-Regler (GEFRAN F650) vorgegeben.
Zwei triaxiale Kraftsensoren (KISTLER 9017B) ermöglichten die Messung der Kontaktkräfte und die Berechnung des Reibungskoeffizienten als Verhältnis der tangentialen Kraftanteile zur normal bzw. vertikal wirkenden Kraft.
Die Schwingungsantwort der Struktur wurde mit zwei IEPE-Beschleunigungssensoren (piezoelektrische Sensoren mit integrierter Impedanzwandler-Elektronik) erfasst. Zusätzlich wurde ein Laservibrometer (VibroFlex Neo VFX-I-110) ohne direkte mechanische Kopplung an die Struktur eingesetzt, um das Schwingungssignal des oberen Prüflings in möglichst geringem Abstand (ca. 1 mm) zur effektiven Kontaktfläche zu messen.
Durch die hochtemperaturbeständige Lackierung einer Seite des Prüflings wurde eine für die Lasermessung geeignete reflektierende Oberfläche erzeugt. Für eine optimale Signalaufnahme musste der Laser zudem sorgfältig ausgerichtet werden (siehe Abb. 6).


Signalaufnahmesystem
Alle Messdaten wurden mit einem isolierten SIRIUS-Datenerfassungssystem mit DualCoreADC®-Technologie aufgezeichnet, das über zwei 24-Bit-Delta-Sigma-(ΔΣ-)A/D-Wandler pro Kanal verfügt (siehe Abb. 7).


Dank der DualCoreADC®-Technologie erreicht das SIRIUS-System ein Signal-Rausch-Verhältnis von mehr als 130 dB und einen Dynamikbereich von über 160 dB. Dies entspricht einem etwa 20-fach geringeren Rauschen im Vergleich zu herkömmlichen 24-Bit-Systemen (siehe Abb. 8). Diese Eigenschaft ermöglicht die Aufzeichnung komplexer Signale einschließlich hochamplitudiger Spektralkomponenten und niedrigamplitudiger Anteile, wie sie für diese Analyse erforderlich waren.


Eine weitere wichtige Eigenschaft dieses Systems ist die Option, für jeden Eingangskanal unterschiedliche Abtastraten zu definieren. Dabei werden niedrigere Abtastraten für langsam veränderliche Signale – wie beispielsweise die Temperaturmessung mit Thermoelementen – eingesetzt.
Die elektrischen Verbindungen erfolgten über BNC-Steckverbinder für Koaxialkabel, die eine konstante Leitungsimpedanz gewährleisten. Diese Kabel bestehen aus einem inneren Kupferleiter, der von einem dielektrischen Material (in der Regel PTFE) umgeben ist, um ihn vom äußeren metallischen Schirm zu trennen, der elektromagnetische Störungen abschirmt.




A/D-Wandlung ist die Diskretisierung – insbesondere Digitalisierung – eines kontinuierlichen (analogen) Signals durch Abtastung. Dabei wird eine endliche Anzahl von Daten-Samples in regelmäßigen Zeitabständen ΔT (Abtastperiode) aus dem Eingangssignal gewonnen. Grundlegendes Prinzip ist dabei das Nyquist-Theorem, das besagt, dass die Abtastfrequenz s = 1/T die folgende Bedingung erfüllen muss:
wobei MAX die höchste im Signal enthaltene Frequenz darstellt.
Die Nichtbeachtung dieses Prinzips führt zu Aliasing und damit zu Informationsverlust.
Unter Berücksichtigung dieser Aspekte wurden die Abtastraten für die einzelnen Kanäle wie folgt festgelegt:
Für die Beschleunigungssensoren und die Laser-Geschwindigkeitssignale wurde eine Abtastfrequenz von 100 kHz gewählt, da diese Signale zur Charakterisierung der Schwingungsantwort dienen.
Die Kraftsensoren sowie die Signale des Wegaufnehmers wurden mit 50 kHz abgetastet.
Für die Thermoelement- und Laser-Niveausignale wurde aufgrund ihrer langsamen zeitlichen Änderung eine Abtastrate von 125 Hz gewählt.
Auf Grundlage der aufgezeichneten Signale wurden in DewesoftX weitere mathematische Operationen durchgeführt (siehe Abb. 11).


Der Reibungskoeffizient wurde anhand des Verhältnisses zwischen dem gemessenen Tangentialkraftsignal und der aufgebrachten Normallast definiert (siehe Abb. 10), und während der parametrischen Lastanalyse wurde eine Anpassung vorgenommen, um die tatsächlich aufgebrachte Last zu berücksichtigen. Diese Korrektur war notwendig, da die Signale der Normalkraftsensoren von einem Driftphänomen beeinflusst wurden.
Diese Drift führte selbst bei konstanter Last zu einer Verschiebung der angezeigten Messwerte infolge thermischer Effekte. Zur Kompensation wurde eine Korrektur unter Verwendung eines interpolierenden Polynoms durchgeführt.


Das wechselnde Vorzeichen des Reibungskoeffizienten ergibt sich aus den unterschiedlichen Hubrichtungen der Vor- und Rückbewegung. Zu beachten ist, dass ein negativer Reibungskoeffizient hier keine physikalische Bedeutung besitzt, sondern ausschließlich der Unterscheidung zwischen Vor- und Rückbewegung dient. In den folgenden Abschnitten wird daher ausschließlich der Absolutwert berücksichtigt.
Das Geschwindigkeitsprofil wurde durch zeitliche Ableitung des vom linearen optischen Encoder aufgezeichneten Wegsignals bestimmt (siehe Abb. 13).


Auf die Beschleunigungssignale wurde ein Butterworth-Hochpassfilter 6. Ordnung mit einer Grenzfrequenz von 5 Hz angewendet, um niederfrequente Störungen infolge des vorgegebenen Bewegungsablaufs zu unterdrücken. Zusätzlich wurde auf die gefilterten Signale eine Kurzzeit-Fourier-Transformation (Short-Time Fourier Transform, STFT) angewendet.

 Normal load, (2) Tangential force, (3) Samples temperature, (4) Velocity profile (magenta) and displacement (light blue), (5) Normal direction (Z) accelerometer signal, (6) Normal and tangential (X) accelerometers signals, (7) Laser velocity signal (green) and laser level, (8) Friction coefficient.")
Versuchsreihe
Es wurden mehrere parametrische Versuche durchgeführt, um das Reibungs- und Dynamikverhalten in Abhängigkeit von wesentlichen Kontaktparametern zu untersuchen, nämlich
der Normallast,
der Gleitgeschwindigkeit und
der Kontakttemperatur.
Während der Versuche erfasste das SIRIUS-Datenerfassungssystem sämtliche Signale und zeichnete parallel Videobilder von zwei Kameras auf. Beispielsweise wurde mithilfe der DewesoftX-Software ein Video des Reibkontakts während der Vor- und Rückbewegung aufgenommen. Dieses Video verdeutlicht eine nützliche Funktion der Software: die Echtzeitvisualisierung des Spektrogramms. Sie erlaubte es, die Veränderungen der Frequenzmuster direkt während der Messung zu beobachten.
Beispielhafte Ergebnisse
Eine interessante Beobachtung ergibt sich aus dem Vergleich zweier Versuche mit unterschiedlichen Gleitgeschwindigkeiten. In der Fachwelt besteht weitgehend Einigkeit darüber, dass Bremsenquietschen bei höheren Geschwindigkeiten weniger wahrscheinlich ist. Alltagsbeobachtungen – etwa beim Vergleich eines Bremsvorgangs auf der Autobahn mit dem vor einer Ampel – scheinen dem jedoch zu widersprechen. Die vorhandene Literatur bietet hierfür bislang keine eindeutige Erklärung.




Abb. 15 zeigt die unterschiedlichen Ergebnisse von Reibgeräuschmessungen bei zwei Gleitgeschwindigkeiten bei Raumtemperatur. Der spektrale Energieinhalt ist bei der höheren Geschwindigkeit größer als bei der niedrigeren, da mehr Leistung in den Kontakt eingebracht wird:
Ein wesentlicher Unterschied zeigt sich in der Frequenzverteilung der Schwingungsenergie. Während die dominierende Frequenzspitze bei hohen Geschwindigkeiten höher ist, verteilt sich relativ mehr Energie über einen breiten Frequenzbereich.
Bei niedrigen Geschwindigkeiten konzentriert sich die Energie hingegen auf eine schmalbandige Verteilung. Eine mögliche Erklärung für die unterschiedliche Quietschwahrscheinlichkeit bei niedrigen und hohen Geschwindigkeiten könnte daher in der breiteren Frequenzverteilung der dynamischen Kontaktanregung bei hohen Geschwindigkeiten liegen, die Störungen bei Frequenzen außerhalb der instabilen Mode verursacht.
Bei niedrigen Geschwindigkeiten ist die Energie also um ein schmales Frequenzband konzentriert. Eine signifikante Anregung der entsprechenden Modenfrequenz führt dazu, dass das System instabil wird. Das Ergebnis ist die modale Instabilität, wie sie in Abb. 14 und 15 dargestellt ist.

 showing the unstable frequency")

 from the laser velocity’s signal. At the bottom is the friction coefficient during the selected stroke, the accelerometer’s signal, the laser velocity’s signal, and the normalized spectrogram on the laser velocity signal.")
Fazit
In der Bremsenindustrie wird instabilen reibungsinduzierten Schwingungen große Bedeutung beigemessen. Diese Phänomene erzeugen Geräusche wie Bremsenquietschen und führen zu Oberflächenschäden.
Die Relevanz solcher Phänomene hat durch die Einführung von neuen Materialien wie C/C-Verbundwerkstoffen zugenommen, die eine adäquate tribologische Charakterisierung erfordern. Trotz intensiver Forschung über mehr als 80 Jahre hinweg fehlt bislang eine abschließende Erklärung für die Ursachen des Bremsenquietschens.
Ziel dieser Untersuchung war die Herstellung eines Zusammenhangs zwischen auftretenden Kontaktinstabilitäten, Modenkopplung und der dynamischen Anregung aus dem Reibkontakt, die reibungsinduzierte Geräusche verursacht. Zur umfassenden Charakterisierung dieses reibungs- und schwingungsbedingten Phänomens wurde Dewesoft-Technologie eingesetzt, die eine präzise Signalerfassung am TriboAir-Prüfstand über den gesamten relevanten Frequenz- und Amplitudenbereich ermöglicht.
Referenzen
Di Bartolomeo M., Massi F., L. Baillet, A. Culla, A. Fregolent e Y. Berthier: Wave and rupture propagation at frictional bi-material sliding interfaces: from local to global dynamics, from stick-slip to continuous sliding. Tribology International, vol. 52, pp. 117-131, 2012.
Hoffmann N., Bieser S., and Gaul L.: Harmonic Balance and Averaging Techniques for Stick-Slip Limit-Cycle Determination in Mode-Coupling Friction Self-Excited Systems. 2004.
Lacerra G., Di Bartolomeo M., S. Milana, L. Baillet, E. Chatelet e F. Massi: Validation of a new frictional law for simulating friction-induced vibrations of rough surfaces. Tribology International, vol. 121, pp. 468-480, 2018.
Lazzari, A., Tonazzi, D., Massi, F.: Squeal propensity characterization of brake lining materials through friction noise measurements. Mech. Syst. Signal Process. 128, 216–228 (2019).
Smith, G. Maloy: Dewesoft Data Acquisition Technology Explained. 2022.
Tonazzi D., Massi F., L. Baillet, A. Culla, M. Di Bartolomeo e Y. Berthier: Experimental and numerical analysis of frictional contact scenarios: from macro stick-slip to continuous sliding. MECCANICA, vol. 50, n. 3, pp. 649-664, 2015.