




Optimierung der Leistung von Tragflügeln durch Modalanalyse und piezoelektrische Resonanznebenschlussdämpfung
Shouhong Qin, Master student of structural mechanics
CNAM
September 26, 2024
Zur Optimierung des dynamischen Verhaltens von Tragflügeln (Hydrofoils) greifen Forscher auf die piezoelektrische Resonanznebenschlussdämpfung zurück. Diese Technik umfasst eine detaillierte Modalanalyse der Tragflügelstruktur und die anschließende Abstimmung des Systems auf eine bestimmte Eigenfrequenz mithilfe von Induktivitäten. Der Versuchsaufbau nutzt piezoelektrische Patches zur Kontrolle von Biegung und Torsion und misst die Frequenzgangfunktionen (FRF) unter Leerlauf- und Kurzschlussbedingungen.
Was sind Tragflügel?
Tragflügel funktionieren ähnlich wie Tragflächen. Es handelt sich um speziell geformte Flügel oder Schaufeln, die unter Wasser am Rumpf eines Bootes oder Schiffes angebracht werden, um Auftrieb zu erzeugen, wenn sich das Fahrzeug durch das Wasser bewegt. Indem sie den Rumpf aus dem Wasser heben, verringern sie den Widerstand, sodass das Schiff höhere Geschwindigkeiten und eine bessere Kraftstoffeffizienz erreichen kann.
Die Anwendung der piezoelektrischen Resonanznebenschlussdämpfung auf einen Tragflügel zielt darauf ab, dessen dynamische Eigenschaften zu verbessern, indem piezoelektrische Materialien zur Kontrolle von Biegung und Torsion integriert werden. Dieser innovative Ansatz kann die Schwingungsdämpfung optimieren und bietet wertvolle Erkenntnisse für Fortschritte in der Meeres- und Luftfahrttechnik.
Unser Ziel war es, in einer Reihe von Laborsitzungen eine detaillierte Modalanalyse durchzuführen und passive Induktivitäten zu entwerfen. Zudem wollten wir mithilfe von Resonanznebenschluss-Schaltungen die Schwingungen eines NACA-Tragflügels reduzieren.
Ablauf des Experiments
Im Labor für Strukturmechanik und gekoppelte Systeme des französischen CNAM (Nationales Konservatorium für Kunst und Gewerbe) untersuchten wir in drei Schritten die piezoelektrische Resonanznebenschlussdämpfung an einem Tragflügel. Der erste wichtige Schritt war die Durchführung einer Modalanalyse der Struktur.
Der zweite Schritt bestand darin, mehrere Lösungsansätze für die Abstimmung der Struktur auf eine spezifische Eigenfrequenz vorzuschlagen. Der dritte Schritt war die Validierung des resultierenden Frequenzgangs nach Integration der Induktivität in die Schaltung.
Modalanalyse des Tragflügels
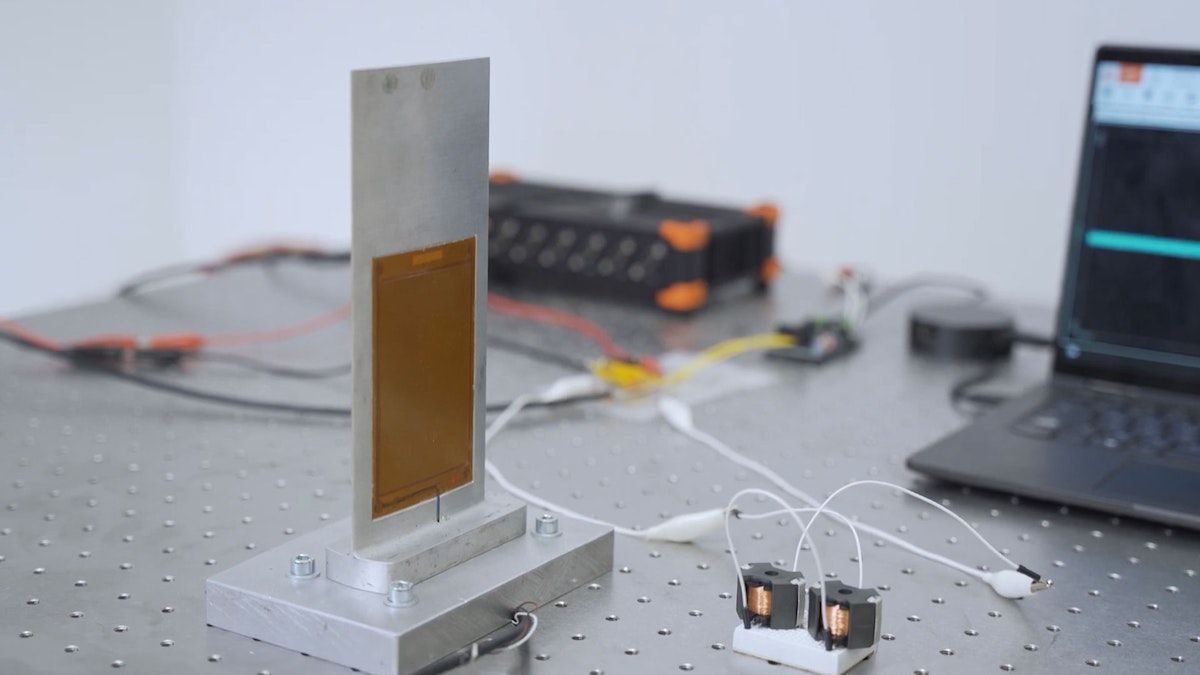
Im Versuchsaufbau wurde der Tragflügel mit zwei piezoelektrischen Patches (Flächenwandler) zur Kontrolle der Biegung auf einer Seite und einem Patch zur Kontrolle der Torsion auf der anderen Seite ausgestattet. Im Versuchsaufbau diente einer der beiden Biegungs-Patches zur Eingangsanregung und der zweite als Sensorausgang. Das Eingangssignal war eine Erregerspannung, das Ausgangssignal die Spannung an den Elektroden des als Sensor dienenden Flächenwandlers.
Während des Experiments maßen wir die FRF sowohl im Kurzschluss- als auch im Leerlaufzustand. Das dynamische Verhalten des Prüflings sollte sich aufgrund der piezoelektrischen Patches in beiden Fällen unterscheiden.


Als Erregungssignal für das Experiment wurde ein Chirp-Signal gewählt. Wir entschieden uns dafür, da ein Chirp-Signal ein breites Frequenzspektrum abdeckt und somit die Untersuchung des Frequenzgangs über einen weiten Bereich mit einer einzigen Anregung ermöglicht.
Ein Chirp-Signal ist ein Signaltyp, bei dem die Frequenz im Laufe der Zeit zu- oder abnimmt. Es wird häufig in Anwendungen wie Radar, Sonar, Kommunikation oder Schwingungstests eingesetzt, da es die Erfassung der Systemantwort über einen großen Frequenzbereich ermöglicht. Durch den gleichmäßigen Übergang von niedrigen zu hohen (oder hohen zu niedrigen) Frequenzen sind Chirp-Signale besonders gut dazu geeignet, festzustellen, wie sich verschiedene Frequenzen auf ein System oder eine Umgebung auswirken.
Liste der Datenerfassungshardware und -software
Für die Datenerfassung und -analyse verwendeten wir:
DEWE-43: DEWE-43 ist ein vielseitiges 8-kanaliges USB-Datenerfassungssystem. Das handliche Gerät verfügt über acht universelle Analogeingänge, acht Digital-/Zähler-/Encodereingänge und zwei Hochgeschwindigkeits-CAN-Bus-Eingänge.
DewesoftX: DewesoftX ist eine Datenerfassungs- und Signalverarbeitungssoftware für die Signalmessung und die Aufzeichnung, Analyse und Visualisierung von Daten in zahlreichen Test- und Messanwendungen in allen Märkten.
Durch das Trennen und Verbinden der beiden Elektroden des Torsions-Patches erhielten wir zwei Gruppen von FRF-Daten, die dem Leerlauf- und dem Kurzschlusszustand entsprechen. Wir untersuchten zwei Resonanzspitzen:
Die erste Schwingungsmode (Biegung) tritt bei einer Frequenz von etwa 98 Hz auf.
Die zweite Schwingungsmode (Torsion) tritt bei etwa 520 Hz auf.
Um ein detaillierteres Ergebnis für die zweite Mode zu erhalten, extrahierten wir die FRF im Bereich von 500 Hz bis 540 Hz. Abb. 2 zeigt die Ergebnisse für den Kurzschluss- und den Leerlaufzustand.


Nach der Messung der FRF-Daten musste die piezoelektrische Kapazität bestimmt werden. Um den Einfluss der Eigenformen zu vermeiden, maßen wir die Kapazität bei einer Frequenz, die entfernt von den Moden 1 und 2 liegt. Die mit einem Kapazitätsmessgerät gemessene Kapazität bei 1000 Hz betrug 13,62 nF.
Um den genauen Wert der Eigenfrequenz der Mode 2 zu ermitteln, wandten wir die Rational-Fraction- Polynomial-Methode (RFP) an und analysierten die erfassten Daten in DewesoftX.
Mittels der Ausführung der RFP- und Orthogonalfunktionen erhielten wir die Kurvenanpassungs- und Eigenfrequenzergebnisse. Abb. 3 und 4 zeigen die mit der RFP-Methode synthetisierten Frequenzgänge für den Kurzschluss- und den Leerlaufzustand, die die experimentellen Frequenzgänge korrekt approximieren.


Im nächsten Schritt extrahierten wir die Eigenwinkelfrequenzen im Kurzschluss- und Leerlaufzustand mithilfe der Beziehung
Daraus konnten wir anhand der folgenden Gleichungen die optimalen Werte für die Induktivität L und den Widerstand R bestimmen:
Eigenfrequenz (Kurzschluss) = 518,4547 Hz
Eigenfrequenz (Leerlauf) = 520,4007 Hz
Eigenwinkelfrequenz (Kurzschluss) = 3,2575e+03 rad/s
Eigenwinkelfrequenz (Leerlauf) = 3,2698e+03 rad/s
Kopplungsfaktor = 8,67 %, Induktivitätswert = 6,9 H, Widerstand = 2388,5 Ω
Der Kopplungsfaktor zeigt den Unterschied zwischen Kurzschluss- und Leerlaufbedingungen. Im Leerlaufzustand weist die Struktur eine leicht höhere Eigenfrequenz auf als im Kurzschlusszustand. Diese Abweichung verdeutlicht, dass die elektrischen Randbedingungen die mechanischen Schwingungen des Tragflügels erheblich beeinflussen.
Konzeption und Realisierung der passiven Induktivität
Wie in Abb. 5 dargestellt, besteht eine passive Induktivität aus vier Teilen: Kern, Spulenformer, Spule und Klemmen. In unserem Fall verwendeten wir einen RM-Kern (von TDK Electronics) und eine Spule aus Kupferdraht.


Nach der Betrachtung des Aufbaus befassen wir uns nun mit dem Induktivitätswert, dem Widerstand und dem Füllfaktor der Induktivität. Der Induktivitätswert hängt direkt von der Anzahl der Windungen und der Permeanz des Magnetkreises ab und lässt sich aus der folgenden Formel ableiten, wobei AL die Permeanz und N die Anzahl der Windungen darstellt.
In unserem Fall beträgt der Induktivitätswert 6,9 H. Der Permeanzwert ist den Angaben von TDK Electronics zu entnehmen, da jeder RM-Kern-Typ mehrere unterschiedliche Permeanzwerte aufweist. Die Anzahl der Windungen ergibt sich aus der Formel.
Der Serienwiderstand RS modelliert die Kupferverluste im Draht, während der Parallelwiderstand Rp die Eisenverluste im Magnetkreis darstellt (siehe Abb. 5). In diesem Fall vernachlässigen wir den Parallelwiderstand und definieren den Widerstand wie folgt:
Dabei ist ρ der spezifische Widerstand von Kupfer, der 17,2 µΩ·mm beträgt. lN ist die Drahtlänge, die von der Art des RM-Kerns abhängt, und Sω der Drahtquerschnitt. Dann führen wir den Füllfaktor ein:
Dabei ist AN der Wert des Windungsquerschnitts, der vom Spulenformer abhängt. Da der Füllfaktor typischerweise bei etwa 0,5 liegt, hilft dieser Wert bei der Bestimmung eines geeigneten Drahtdurchmessers. Mithilfe der folgenden Gleichung kann auch der Widerstand berechnet werden:
Hierbei hängt ebenfalls vom Spulentyp ab. Bei der Berechnung sollten RS und RCu ähnliche Ergebnisse liefern.
Im nächsten Schritt berechnen wir den Durchmesser des entsprechenden Kerntyps für die Induktivität. Wir können den Matlab-Code aus Abb. 6 verwenden, um die Anzahl der Windungen, die Querschnittsfläche, den Serienwiderstand, den Widerstand RCu und schließlich den Drahtdurchmesser zu ermitteln. In diesem Fall dient die Berechnung von RS sowie RCu dazu, die Äquivalenz der beiden Formeln zu überprüfen.

")
Das Ziel war es, eine unter Berücksichtigung des Durchmessers der vorhandenen Kupferdrähte realisierbare Lösung zu finden:
Die erste Lösung verwendet einen RM14-Kern aus dem Material PC200 ohne Luftspalt. In diesem Fall beträgt der theoretische Serienwiderstand 75,28 Ω, und der Widerstand bei Verwendung eines Kupferdrahtes mit 0,2 mm Durchmesser beträgt 70,84 Ω.
Die zweite Lösung verwendet einen RM12-Kern aus dem Material N87 (oder N97) ohne Luftspalt. In diesem Fall beträgt der theoretische Serienwiderstand 37,30 Ω, und der Widerstand bei Verwendung eines Kupferdrahtes mit 0,2 mm Durchmesser beträgt 38,04 Ω.
Die dritte Lösung besteht in der Verwendung von zwei bereits verfügbaren RM10-Induktivitäten mit Induktivitätswerten von 1,5 H bzw. 6,0 H und Widerständen von 72 Ω bzw. 325 Ω. Diese Lösung bietet einen relevanten hohen Widerstand und kann mit zwei 1000-Ω-Widerständen kombiniert werden, um den optimalen Widerstand des zuvor definierten Resonanznebenschlusses zu erhalten.
Implementierung von einmodigen Resonanznebenschlüssen
Wir implementierten die Lösung mit den beiden Induktivitäten und untersuchten mehrere Frequenzgänge unter verschiedenen Bedingungen. Ziel war es, zunächst den Frequenzgang um die zweite Eigenfrequenz des Tragflügels ohne Induktivitäten zu ermitteln. Dann fügten wir die Induktivitäten in die Schaltung ein und verglichen die Ergebnisse. Abschließend nahmen wir verschiedene Anpassungen der Widerstands- und Induktivitätswerte vor, um die zuvor ermittelten optimalen Parameter zu erreichen.
Zunächst maßen wir den Frequenzgang ohne die Induktivitäten mittels Spannung/Spannung-FRF im Frequenzbereich von [470, 570] Hz. Das Ergebnis verwendeten wir als Referenz für den Vergleich nach dem Anschluss der Induktivitäten.
Anschließend implementierten wir die Induktivitätsschaltung, wobei der Gesamtinduktivitätswert 1,5 H + 6,0 H = 7,5 H und der Gesamtwiderstand 72 Ω + 325 Ω = 397 Ω betrug.
Auf diese Weise erhielten wir die Frequenzgangdaten (Spannung/Spannung) sowohl ohne als auch mit Induktivitäten.
Das Ergebnis ist in Abb. 7 in Form eines Matlab-Diagramms dargestellt.

Das Ergebnis des ursprünglichen Frequenzgangs ist zufriedenstellend, da wir die Resonanzspitze in der Abbildung erkennen können. Dank der mit der Induktivität gemessenen FRF wird auch die starke Wirkung des Resonanznebenschlusses deutlich.
Diese Ergebnisse sind jedoch schwer zu interpretieren, da die Verwendung der Spannung als Ausgangssignal die Bewertung der korrekten Abstimmung des Nebenschlusses erschweren kann. Daher verwendeten wir in den nachfolgenden Experimenten die Beschleunigung als Ausgangssignal, um die Details des dynamischen Verhaltens der Struktur zu untersuchen.
Nachdem wir den Versuchsaufbau um einen Beschleunigungsmesser erweitert hatten, erhielten wir neue Frequenzgangdaten, die in Abb. 8 und 9 dargestellt sind.




Die beiden Abbildungen zeigen, dass die Induktivitäten die Schwingungsamplitude der Struktur im Bereich der zweiten Eigenfrequenz deutlich reduzierten. Dennoch war der Widerstandswert der Induktivitäten niedriger als der Sollwiderstand von 2388,5 Ω. Wir verwendeten Matlab, um die aus der DewesoftX-Software exportierten Daten in einem Diagramm darzustellen und die Ergebnisse zu vergleichen.
Um den optimalen Widerstandswert zu erreichen, fügten wir zwei zusätzliche 1000 Ω-Widerstände hinzu. Abb. 10 zeigt die Ergebnisse der folgenden Szenarien: 1) ohne Induktivität, 2) ohne mit den Induktivitäten in Reihe geschaltete Widerstände und 3) mit zusätzlichen, mit den Induktivitäten in Reihe geschalteten 2000 Ω.

Wenn der Widerstand der Schaltung nicht in der Nähe des optimalen Wertes liegt, weist die Struktur zwei Resonanzspitzen mittlerer Amplitude auf. Nach Hinzufügen des zusätzlichen Widerstands betrug der Widerstandswert der Schaltung 397 Ω + 2000 Ω = 2397 Ω und lag damit nahe am optimalen Widerstandswert von 2388,5 Ω.
Mit dem optimalen Widerstand wurde die dynamische Antwort im Vergleich zum Szenario mit 397 Ω über einen breiten Frequenzbereich minimiert.
Wir fügten einen zusätzlichen Widerstand hinzu, um zu untersuchen, wie der Widerstand die FRF beeinflusst. Außerdem erreichten die beiden Spitzen beim optimalen Widerstand nicht dieselbe Amplitude. Dies könnte durch eine Anpassung des Induktivitätswertes möglicherweise verbessert werden.
Im nächsten Schritt verglichen wir daher die Szenarien „optimaler R-Wert“, „zusätzlicher R-Wert“ und „optimaler R- und L-Wert“. In Abb. 11 ist zu erkennen, dass mit dem zusätzlichen Widerstand die Resonanzspitze im Eigenfrequenzbereich wieder auftritt. Außerdem zeigt sich, dass der Induktivitätswert die relative Amplitude der beiden Resonanzspitzen im Frequenzgang beeinflussen kann.

Fazit
Der Resonanznebenschluss kann das dynamische Verhalten der Struktur um eine bestimmte Mode erheblich verbessern. Die Dämpfungsleistung kann durch die Wahl eines geeigneten Induktivitätswerts und Widerstands, die nahe den theoretisch berechneten optimalen Werten liegen, gesteigert werden. Der Widerstand kann die Amplitude der Resonanzspitzen im Frequenzgang beeinflussen. Ein Widerstand, der geringer ist als der optimale Wert, führt zu einer Erhöhung der Amplituden beider Spitzen, während ein Widerstand, der den optimalen Wert überschreitet, nur eine einzelne Spitze erzeugt.
Schließlich kann der Induktivitätswert das Verhältnis zwischen den beiden Resonanzspitzen beeinflussen. Diese Abstimmungsmöglichkeiten bieten spannende Perspektiven für die Schwingungsdämpfung mechanischer Strukturen in verschiedenen Anwendungen, zu denen auch Tragflächen oder -flügel zählen, die Strömungsanregungen ausgesetzt sind.