




Sincronizzazione dell'Acquisizione Dati e Metodi di Temporizzazione

October 21, 2021
In questo articolo approfondiremo i metodi di sincronizzazione e temporizzazione nell'acquisizione dati. Vedremo anche come avviene la sincronizzazione dei dati all’interno dei Sistemi di Acquisizione Dati Dewesoft (DAQ) e come questa avviene tra più sistemi. Alla fine saremo in grado di:
Scoprire Scoprire come i dati analogici e digitali vengono sincronizzati sia all'interno di un singolo sistema sia su più sistemi, indipendentemente dal fatto che siano direttamente collegati o molto distanti l'uno dall'altro.
Imparare i metodi di temporizzazione e sincronizzazione di flussi di dati aggiuntivi da dispositivi industriali, bus dati automobilistici e aerospaziali, video (e altro) con dati analogici e digitali.
Capire innanzitutto perché è necessaria la sincronizzazione e quali vantaggi offre.
Pronto? Iniziamo!
Perché la Sincronizzazione dei Dati è Necessaria?
Nel mondo dell'acquisizione dati (DAQ), i dati devono essere misurati con la massima accuratezza e precisione possibile. Quando pensiamo a questi termini, normalmente pensiamo alla misura dell'asse dell'ampiezza. Dopotutto, è un sistema di misura, giusto? Ad esempio, se inseriamo 1.000 V, non dovrebbe misurare 1,5 V o 0,8 V. Queste misure sarebbero non accurate oltre che imprecise.
Ma c'è un altro asse quando si misurano i dati temporali: l'asse del tempo. È altrettanto importante sapere quando è successo qualcosa rispetto al tempo e agli altri dati, e per quanto tempo quell’evento si è verificato.
Diamo quasi per scontato che se immettiamo lo stesso segnale in più canali di un sistema DAQ, le forme d'onda risultanti saranno perfettamente sincronizzate tra loro nella registrazione. Ma questo potrebbe non essere sempre vero.
Consideriamo ad esempio una scheda A/D multiplexed economica che utilizza un singolo ADC per digitalizzare tutti i canali. Questa può digitalizzare solo un canale alla volta, quindi i canali che cattura sono leggermente distorti sull'asse del tempo. A causa della risoluzione relativamente bassa dello schermo di un computer, questa inclinazione potrebbe non essere visibile, ma è presente. Quando si eseguono misure di fase, anche un singolo spostamento del campione può compromettere la misura.


La maggior parte delle applicazioni di misura a media e alta frequenza richiedono che i dati siano sincronizzati all'interno del sistema DAQ. Quando inseriamo i dati nel nostro sistema DAQ e vengono acquisiti in un singolo file dati, ci aspettiamo che tutti i dati vengano sincronizzati insieme.
La precisione sull'asse dell'ampiezza e del tempo è fondamentale per qualsiasi strumento di misura della storia temporale. Se il nostro sistema di misura non è in grado di effettuare misure corrette, che senso ha effettuare misure?
A volte è anche necessario che più sistemi DAQ siano sincronizzati insieme. Ciò si verifica quando il test ha un numero di canali elevato per poter essere gestito da un singolo sistema DAQ o quando i sistemi DAQ devono misurare in posizioni diverse, a volte distanti l'uno dall'altro. Per analizzare i dati dopo il test, i dati registrati da ciascun sistema DAQ devono essere allineati tra loro e con riferimento a un orologio esterno o a un riferimento temporale.
Sorgenti dei Tempi di Sincronizzazione
Esistono numerose sorgenti e protocolli di temporizzazione che possono essere utilizzati per sincronizzare i sistemi DAQ, tra cui:
IRIG Time Code
GPS PPS
NTP
EtherCAT
PTP V2
Vediamole nel dettaglio.
IRIG (Inter-Range Instrumentation Group)
IRIG (Inter-Range Instrumentation Group) è uno standard di temporizzazione sviluppato negli anni '50 presso il White Sands Missile Range negli Stati Uniti. Il suo scopo era quello di consentire ai militari di marcare con data e ora i dati dei test provenienti da una varietà di strumenti e fonti, inclusi sistemi DAQ, videocamere, telemetria e altro ancora. Nel corso dei decenni, lo standard timecode IRIG è stato adottato da molti utenti in tutto il mondo. Oggigiorno viene utilizzato anche da utenti non militari, come le centrali elettriche, che hanno bisogno di sincronizzare i sistemi di generazione di energia su una vasta area geografica.
GPS PPS
GPS PPS (Impulsi al Scondo) è un impulso estremamente preciso trasmesso dai satelliti GPS/GNSS. In effetti, l'accuratezza della temporizzazione PPS sui ricevitori GNSS commerciali è di circa ±25 ns. Il tempo è trasmesso e fa riferimento al preciso impulso al secondo.
NTP (Network Time Protocol)
NTP (Network Time Protocol) è un protocollo di rete per la sincronizzazione del clock tra i sistemi informatici. A +10 ms, NTP è meno accurato di altri metodi qui menzionati, ma risulta comunque utile in molte applicazioni.
EtherCAT
EtherCAT ("Ethernet for Control Automation Technology") è un protocollo che porta la potenza e la flessibilità di Ethernet nel mondo dell'automazione industriale, del motion control, dei sistemi di controllo in tempo reale e dei sistemi DAQ. Il clock distribuito integrato di EtherCAT fornisce eccellenti prestazioni di "jitter" molto inferiori a un microsecondo (1 µs), che è equivalente a IEEE 1588 PTP (Precision Time Protocol). Questo senza la necessità di hardware aggiuntivo. I sistemi EtherCAT possono utilizzare il clock del master o essere collegati a un riferimento temporale esterno assoluto, come GPS o IRIG.
PTP (Precision Time Protocol)
PTP V2 è un protocollo master/slave avanzato per la distribuzione di un clock tra dispositivi interconnessi. È stato standardizzato in IEEE 1588-2008 e aggiornato in IEEE 1588-2019. Nota: PTP V2 non è retrocompatibile con la versione precedente di PTP IEEE 1588-2002. Come EtherCAT, PTP V2 è un protocollo di trasporto che può essere riferito a un riferimento temporale assoluto esterno, come GPS o IRIG.
Tipi di Sincronizzazione
Esistono essenzialmente tre tipi di sincronizzazione supportati dai sistemi DAQ Dewesoft. Inoltre, strumenti DAQ singoli o multipli possono essere riferiti a un riferimento temporale assoluto esterno.
Sincronizzazione dei canali su un singolo sistema DAQ:
Sincronizzazione Interna
Sincronizzazione dei canali tra più sistemi DAQ:
Sincronizzazione Locale
Sincronizzazione Remota
Riferimento Temporale Assoluto
Sincronizzazione dei Canali Interni

")
Nel caso dei dati analogici, la sincronizzazione intercanale è compito del nostro sistema ADC. L'approccio più ovvio consiste nell'utilizzare un sistema ADC con un ADC separato per ciascun canale e pilotarli con un singolo impulso di clock estremamente accurato. Il risultato è che tutti gli ingressi analogici vengono campionati nello stesso istante.


Aggiunta di Canali Digitali e Mantenimento della Sincronizzazione
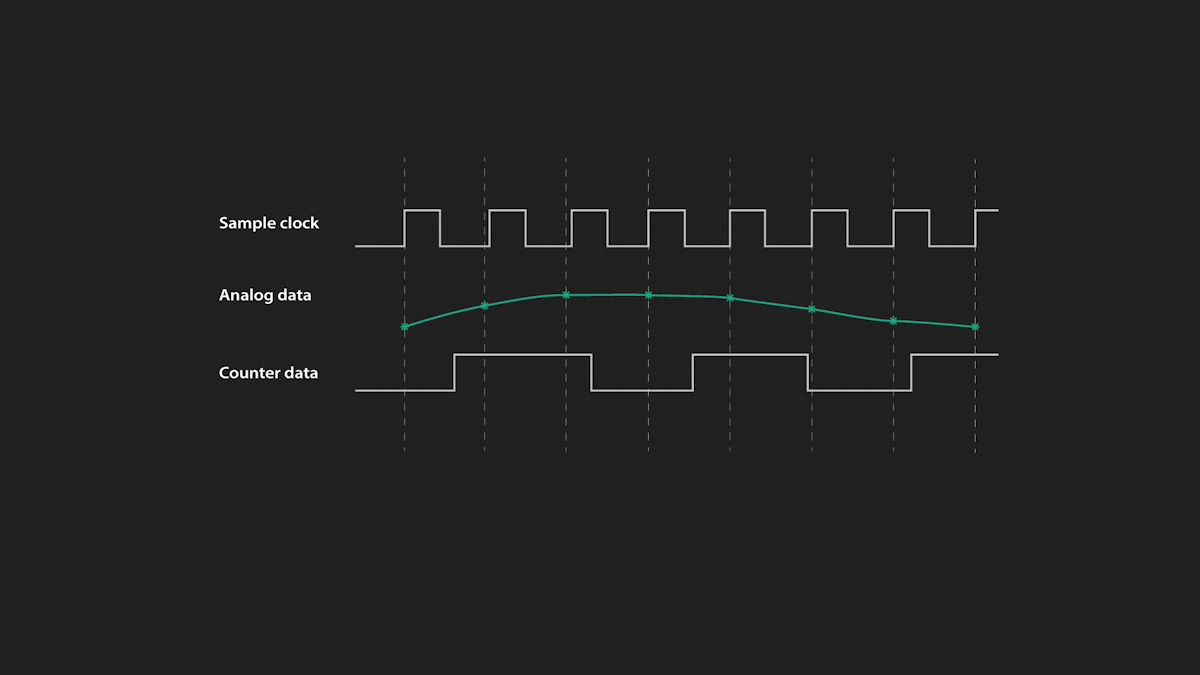
L'uso di ADC separati per canale risolve completamente il problema dello sfasamento temporale per i canali analogici, ma i sistemi DAQ hanno anche altri tipi di ingressi. Ad esempio, la maggior parte di essi fornisce anche ingressi digitali. I sistemi DAQ Dewesoft dispongono di ingressi digital/counter che possono essere utilizzati per acquisire eventi discreti come un treno di impulsi:


Gli ingressi digitali possono essere utilizzati anche per misurare sensori di velocità, RPM, larghezza di impulso, impulso d'uscita, sensori a ruota dentata e per interpretare le uscite in quadratura da encoder incrementali rotativi e lineari.


La sfida è che questi ingressi digitali devono essere campionati a velocità molto più elevate rispetto ai nostri canali analogici, quindi non è possibile usare lo stesso sistema di campionamento. Come possiamo quindi mantenerli in perfetta sincronia con i dati analogici?
La soluzione consiste nell'utilizzare una frequenza di campionamento "master" molto più elevata per l'intero sistema. Nel caso degli strumenti Dewesoft, questa velocità è superiore a 100 MHz. Ciò consente di campionare i canali digitali a una velocità molto elevata. E quando l'utente seleziona una frequenza di campionamento per i canali analogici, è semplicemente un divisore dell'altissima frequenza master, mantenendo tutti i campioni perfettamente allineati all'interno del sistema in base al master clock.
Sembra un approccio logico, ma come possono coesistere i valori dei dati analogici e digitali nello stesso sistema quando arrivano a velocità diverse? Cosa succede quando i campioni di dati digitali cadono tra i campioni di dati analogici?
I contatori standard disponibili oggi sulla maggior parte dei sistemi DAQ forniscono solo output a risoluzione intera (ad es. 1, 1, 2, 2). Di conseguenza, le loro uscite sono sempre un campione dietro i dati del sensore analogico. Questo può essere un vero problema in applicazioni come la vibrazione rotazionale o torsionale in cui lo sfasamento anche di un solo campione può modificare i risultati.
La tecnologia brevettata SuperCounter® di Dewesoft risolve completamente questo problema estraendo valori in virgola mobile come 1,37, 1,87, 2,37 e quindi allineandoli con precisione nel tempo con il resto dei dati.
In effetti, un SuperCounter significa avere due counter in uno. L'ingresso viene alimentato in parallelo in entrambi i counter e il counter secondario misura l'ora esatta del fronte di salita del segnale. Viene così calcolato il valore reale del counter rispetto ai valori analogici, fornendo un perfetto allineamento non solo con i segnali analogici ma con tutti i dati in ingresso al sistema Dewesoft (CAN BUS, Video, ecc.).
Nel video seguente viene presentato un confronto nel mondo reale tra la modalità di conteggio normale e la modalità SuperCounting dei sistemi Dewesoft.
Anche altre fonti di dati, come i dati del bus CAN, sono sincronizzate con i dati analogici in tutti i sistemi Dewesoft. I valori digitali in ingresso dal bus CAN sono contrassegnati con precisione in base all'ora rispetto al clock master. Quindi, anche in un sistema DAQ relativamente semplice come il DEWE-43A, i canali analogici, gli ingressi counter/encoder digitale e gli ingressi dati CAN BUS sono tutti perfettamente sincronizzati tra loro (~1 µs).
Origini Dati Sincrone e Asincrone
Esistono molte altre fonti di dati oltre alle interfacce analogiche, digitali e CAN bus integrate che i sistemi DAQ Dewesoft possono registrare. Come vengono gestiti questi segnali rispetto alla sincronizzazione? In questa discussione utilizzeremo delle videocamere perché sono disponibili sia telecamere sincrone che asincrone, consentendo un facile confronto.
L'aggiunta di video all'acquisizione dei dati è uno dei risultati più importanti del software Dewesoft 5.0 originale che risale al 2001. Il video aggiunge un nuovo livello di comprensione ai dati che a volte non può essere raggiunto in nessun altro modo.
Le telecamere industriali di alta qualità (come la serie DS-CAM Dewesoft) hanno una porta di sincronizzazione che consente di controllare i frame rate dal sistema Dewesoft, mantenendo le immagini in perfetta sincronia con il master clock. Tale interfaccia è una SORGENTE DATI SINCRONA perché la sua uscita dati può essere controllata dal master clock tramite la porta SYNC standard sui sistemi DAQ Dewesoft.


Ma ci sono anche webcam USB economiche che non hanno alcuna porta di sincronizzazione. Emettono semplicemente fotogrammi video in base al proprio clock, in base alla velocità selezionata prima dell'inizio dell'acquisizione. Poiché non possono essere sincronizzati esternamente, le webcam emettono DATI ASINCRONI. Come possono essere sincronizzati questi dati con il sistema DAQ?. How can this data be synchronized with the DAQ system?


In assenza di sincronizzazione hardware, i sistemi DAQ Dewesoft possono utilizzare la sincronizzazione software per acquisire dati.
Utilizzando il software DewesoftX, su una webcam DirectX possiamo impostare la frequenza dei fotogrammi e le dimensioni dell'immagine desiderate (in base alle proprietà rese disponibili dalla telecamera tramite l'interfaccia DirectX). Impostiamo la webcam per l'output di 10 fotogrammi al secondo a 640 x 480 pixel ciascuno, quindi avviamo la misura.
Quando il primo frame video arriva alla porta USB del computer, DewesoftX lo registra rispetto al master clock. Ogni frame che arriva alla porta USB avrà un timestamp. Quando i dati vengono rivisti, ogni fotogramma video verrà riprodotto allo stesso modo in cui è stato originariamente acquisito.
Questo tipo di "sincronizzazione software" funziona, ma non può essere precisa come la sincronizzazione hardware perché ci vuole tempo prima che il fotogramma video arrivi attraverso l'USB alla CPU del computer e venga visto dal software. La latenza è in millisecondi, di solito almeno 10 ms e talvolta superiore a seconda della fotocamera e del carico sul computer.
This kind of “software sync” works, but it cannot be as precise as hardware sync because it takes time for the video frame to come through the USB to the CPU of the computer system and be seen by the software. The latency is in milliseconds, usually at least 10 ms and sometimes higher depending on the camera and the load on the computer.


Per mitigare questa latenza, è possibile inserire un valore RITARDO nel software in millisecondi. Questo offset verrà sottratto dalla posizione del timestamp.
Supponiamo che tu faccia un breve test in cui colpisci un sensore mentre vieni ripreso tramite webcam. Quando riproduci i dati, puoi utilizzare i cursori sullo schermo per misurare il ritardo dell'immagine rispetto al picco nei dati. Se è generalmente in ritardo di circa 10 ms, puoi inserirlo come valore di ritardo temporale. Quando i dati vengono riprodotti, i fotogrammi video verranno riprodotti 10 ms prima del timestamp originale.
Sia che tu stia utilizzando una telecamera industriale professionale con una sincronizzazione hardware molto precisa come la serie DS-CAM, o una webcam economica con sincronizzazione software, è possibile collegare e registrare sia le interfacce SYNC che ASYNC nel tuo sistema DAQ Dewesoft.
Per saperne di più:

Fonti di Dati e Metodi di Sincronizzazione Supportati da Dewesoft
I sistemi DAQ Dewesoft sono compatibili con un'ampia gamma di sorgenti dati esterne. Descriverle tutte nel dettaglio va oltre lo scopo di questo articolo, ma ecco un elenco per approfondirne alcuni aspetti:
| Sorgente Dati | Applicazione Principale | Modello | Tipo di Sincronia |
|---|---|---|---|
| Video camere, Industriale | Multiple | DS-CAM series | |
| Webcams | Multiple | Generic webcams (DirectX compatible) | Software |
| Telecamere InfraRossi | Multiple | Optris | Software |
| Telecamere High-speed | Multiple | Photron | Hardware |
| CAN Bus | Automotive | Dewesoft integrated | Hardware |
| CAN FD | Automotive | Dewesoft integrated | Hardware |
| XCP e CCP | Automotive | Via Dewesoft integrated CAN | Hardware |
| XCP e CCP | Automotive | Via Ethernet | Software |
| Flexray | Automotive | Vector brand cards | Software |
| LIN Bus | Automotive | Vector brand cards | Software |
| Kistler KiRoad | Automotive | Kistler KiRoad systems | Software |
| Simulatore di Strada MTS | Automotive | EtherCAT connection to MTS | Hardware |
| GNSS / Piattaforma inerziale | Automotive | Oxford OxTS RT-series GNSS/INS and Genesys ADMA family gyro platforms | Hardware |
| Dati PCM Aerospaziale | Aerospace | DS PCM FS2 | Hardware |
| Interfaccia di Telemetria di Nuova Generazione iNET | Aerospace | Interfaccia Ethernet | Hardware (GPS o IRIG) |
| IRIG 106 Chapter 10 | Aerospace | Interfaccia Ethernet | Hardware (GPS o IRIG) |
| ARINC e MIL-STD-1553 | Aerospace | Hardware AltaDT | Hardware (GPS o IRIG) |
| IRIG Time Code | Aerospace | Cross-platform | Hardware |
| GPS | Aerospace & Automotive | Cross-platform | Hardware |
| Ethernet | Multiple | Bus dati Ethernet | Software |
| EtherCAT® | Industriale | Bus dati EtherCAT | Hardware |
| Siemens S7 PLC | Industriale | Ethernet | Software |
| RS232 / RS485 | Industriale | Cross-platform | Software |
Riepilogo Sincronizzazione Sistema Singolo
Nella prima sezione sopra abbiamo visto che i sistemi Dewesoft hanno la capacità di acquisire un'ampia varietà di dati di sensori, dati digitali, dati video e dati da molte interfacce diverse. Quelle sorgenti che hanno un clock che può essere controllato dal sistema DAQ saranno sincronizzate con il master clock in modo molto preciso: generalmente ~1 µs. Quelle sorgenti che non possono essere controllate riceveranno un timestamp all'arrivo al sistema DAQ, generalmente con una precisione temporale di ~ 10 ms.
Quindi, all'interno di un singolo sistema DAQ Dewesoft è possibile registrare dati analogici da praticamente tutti i sensori analogici esistenti (tensione, corrente, deformazione, accelerazione, suono, pressione, ecc.), oltre a contatori ed encoder digitali di ogni tipo, impulsi digitali discreti, CAN BUS, ARINC 429, MIL-STD-1553, dati RS232, video, video a infrarossi e molto altro ancora - in modo sincrono. È quindi possibile riprodurre tutto sullo schermo, in modo sincrono.
Sincronizzazione Multi-Sistema
E se i canali analogici e digitali di un singolo sistema DAQ non fossero sufficienti per eseguire il test? E se avessimo bisogno di usare due sistemi DAQ? O dieci sistemi DAQ? Cosa succede se i sistemi DAQ non possono essere collegati fisicamente tra loro a causa della distanza o delle barriere fisiche?
In che modo è possibile sincronizzare più sistemi DAQ in modo che i loro dati siano allineati con precisione l'uno con l'altro sull'asse temporale? Ci sono diversi modi per farlo, a seconda delle posizioni fisiche dei sistemi. Diamo un'occhiata a ciascun modo principale per sincronizzare più sistemi DAQ Dewesoft:
Sincronizzazione locale: questo metodo viene utilizzato quando i sistemi DAQ sono posizionati uno vicino all'altro e possono essere sincronizzati tramite cavi.
Sincronizzazione remota: questo metodo viene utilizzato quando i sistemi DAQ sono posizionati in remoto, anche a centinaia di chilometri di distanza l'uno dall'altro.
Sincronizzazione Locale
"Locale" significa che gli strumenti si trovano nella stessa stanza e possono essere facilmente collegati tra loro con cavi USB e SYNC di lunghezza tipica. Tutti gli strumenti Dewesoft hanno una porta SYNC proprio per questo scopo.
Supponiamo di avere uno strumento DAQ modulare SIRIUS. SIRIUS si collega a un computer Windows tramite USB. Il computer esegue il software DewesoftX, fornendo l'interfaccia utente per il sistema, e i dati vengono archiviati nella sua unità interna.
Il modulo SIRIUS per impostazione predefinita lavora come clock master. È anche possibile che il computer fornisca il clock master - ulteriori informazioni su questo nella sezione Riferimento Temporale Assoluto di seguito.


Supponiamo ora che si acquisti una secondo modulo SIRIUS. Potresti collegare quel SIRIUS a un secondo computer e usarlo completamente separatamente dal tuo primo sistema … oppure potresti collegarlo al primo computer e convertire quel sistema da 8 a 16 canali.
Ciascun SIRIUS dispone di un'interfaccia USB che deve essere collegata al computer. Tutti i dati di entrambi i moduli SIRIUS verranno visualizzati sullo schermo di un singolo computer e memorizzati in un unico file di dati. Tutto ciò che serve è collegare tra loro i due moduli SIRIUS utilizzando un semplice cavo di SYNC. Viene fornita una precisione di sincronia a livello di microsecondi.


In questo metodo è possibile connettere fino a otto moduli SIRIUS a un singolo computer e tutti i dati sono completamente sincronizzati e archiviati in un unico file di dati. Ma poiché pochissimi computer offrono così tante interfacce USB, Dewesoft offre hub USB che aggregano tutti i moduli SIRIUS in un'unica interfaccia USB ad alta velocità, quindi il computer avrà bisogno solo di una singola interfaccia USB. I cavi di sincronizzazione sono collegati a margherita da SIRIUS a SIRIUS e viene comunque fornita una precisione a livello di microsecondi.


Va notato che è possibile sincronizzare i dati da un sistema DAQ Dewesoft a un altro senza utilizzare il cavo SYNC. Questo metodo ha una precisione temporale di ~ 10 ms, che è abbastanza buona per semplici misure della temperatura o altre misure a bassa velocità. Questo metodo di "sincronizzazione software" non richiede hardware aggiuntivo. Ma in quasi tutti i casi, il metodo del cavo SYNC è fortemente raccomandato per garantire la sincronizzazione migliore e più accurata possibile.
Utilizzo del cavo di SYNC tra gli strumenti
Nella figura seguente, i cavi SYNC sono collegati a margherita da uno strumento all'altro. Nel software in esecuzione sul computer (non mostrato), lo strumento DEWE 43A a sinistra è stato impostato come "Clock/Trigger Master", quindi gli altri strumenti DAQ ne saranno slave. I loro dati verranno trasmessi al computer come se provenissero da un unico strumento. Il trigger sarà inoltre condiviso dal master agli slave per avviare e interrompere l'acquisizione.


In alternativa, è possibile configurare lo strumento DAQ "master" per l'uscita IRIG-B DC dalla sua porta SYNC e gli altri strumenti saranno impostati come slave a quell'ingresso IRIG. La precisione in entrambe le configurazioni è ~1 µs.


Combinazione di Strumenti Stand-alone e Modulari
Va notato che gli strumenti basati su SIRIUS come le serie R1, R2, R4 e R8 di Dewesoft, includono entrambi i moduli SIRIUS e un computer. Questi strumenti dispongono anche di una porta di sincronizzazione, in modo che gli strumenti DAQ modulari SIRIUS possano essere utilizzati per espanderli con un computer Windows generico (foto sopra).

 con slice di espansione modulare SIRIUS (a sinistra)")
Combinazione di Moduli DAQ EtherCAT
Gli strumenti basati su EtherCAT di Dewesoft possono essere facilmente interconnessi. Questo, infatti, è uno dei tratti distintivi di EtherCAT. Le serie KRYPTON sono collegate tra loro tramite cavo EtherCAT, che trasporta non solo i dati digitalizzati, ma anche alimentazione e sincronizzazione. Il master EtherCAT controlla la rete di moduli.


I moduli KRYPTON possono essere distanti fino a 100 m, in modo da poterli distribuire su un'area molto ampia.
Combinazione di DAQ USB ad Alta Velocità e Moduli EtherCAT
I sistemi DAQ basati su Dewesoft EtherCAT hanno una sincronizzazione interna integrata: questo è uno dei tratti distintivi dell'interfaccia EtherCAT stessa. Un singolo cavo interconnette strumenti come i moduli KRYPTON, ad esempio, trasportando dati, alimentazione e informazioni di clock.
Il master EtherCAT disciplina automaticamente gli orologi di tutti i dispositivi slave collegati e assegna la loro identificazione univoca sulla rete. Questi sono solo alcuni dei motivi per cui EtherCAT è diventato uno standard così forte nel mondo dell'automazione e del controllo industriale.
È possibile combinare insieme strumenti Dewesoft ad alta velocità e Dewesoft EtherCAT combinazioni quasi illimitate. I computer Dewesoft come SBOX e la serie R dispongono già di una porta di sincronizzazione integrata per la sincronizzazione di moduli DAQ aggiuntivi. La CPU KRYPTON ha un'interfaccia EtherCAT. Se stai usando un normale computer, c'è un piccolo dispositivo, SYNC JUNCTION, che fornirà questa funzionalità.


Come accennato, i dispositivi EtherCAT possono essere posizionati a 100 m di distanza l'uno dall'altro, quindi questo sistema può essere distribuito su una vasta area. I moduli KRYPTON possono essere collegati in cascata, consentendo la creazione di un sistema su larga scala:


Esistono diverse possibilità per le configurazioni degli strumenti Dewesoft:
 e KRYPTON (EtherCAT)")
Nell'architettura Dewesoft è integrato il mondo dei dati USB ad alta velocità e dei dati EtherCAT a media velocità, pur mantenendo una perfetta sincronizzazione del clock interno. Guardando l'illustrazione sopra, puoi vedere che l'host della CPU SBOX sta ricevendo tutti i dati USB dai due moduli SIRIUS montati sopra di esso, così come i cinque moduli EtherCAT KRYPTON.
Le slice SIRIUS NON devono essere per forza fissate alla SBOX: possono essere posizionate anche a distanza dall'SBOX in funzione della lunghezza del cavo USB. I moduli EtherCAT possono essere separati fino a 100 metri l'uno dall'altro. La SBOX fornisce la tempistica e la sincronizzazione di tutti i dati.
Si prega di notare che se colleghiamo un master clock esterno alla SBOX come GPS PPS, NTP, IRIG, ecc., tutti i dati saranno riferiti al tempo assoluto.
Ulteriori informazioni su EtherCAT:

Combinazione di Sistemi SIRIUS XHS Tramite PTPv2
Disponibile esclusivamente per i sistemi Dewesoft SIRIUS XHS, PTP v2 è l'ultima versione del protocollo Precision Time Protocol (PTP), in cui un clock master viene utilizzato per sincronizzare tutti gli orologi su una rete di computer. PTP v2 fornisce una precisione di clock di circa 1 µs su una LAN. PTP v2 è un grande passo avanti rispetto all'originale v1 rilasciato nel 2002. PTP v2 ha il tipo di accuratezza e stabilità temporali richieste dalle applicazioni di acquisizione dati.

L'intera rete PTP v2 può essere riferita a qualsiasi sorgente temporale esterna (come IRIG, GPS PPS, ecc., come presentato nella sezione Riferimento Temporale Assoluto) in modo che tutti i dispositivi sulla rete siano riferiti a quel clock. PTP v2 è stato adottato con entusiasmo per transazioni finanziarie, trasmissioni di telefoni cellulari, distribuzione di energia e altre reti che richiedono una precisione temporale migliore di NTP, ma che potrebbero non avere un facile accesso al GPS PPS.
Scopri di più:
")
Sincronizzazione Remota
Gli esempi sopra sono fantastici, ma cosa succede se la distanza tra gli strumenti DAQ è troppo grande e non c'è modo di collegare un cavo di sincronizzazione? Immagina più sistemi DAQ sparsi su più piani di una piattaforma di lancio di un veicolo spaziale, con tutti i dati in streaming che tornano verso un centro di controllo a 5 km. Oppure, più sistemi DAQ sparsi in un grande impianto di produzione.


In questo caso, possiamo utilizzare l'opzione software Dewesoft NET per consentire ai sistemi di essere collegati tra loro tramite ethernet utilizzando TCP/IP. Si tratta di ethernet standard e può essere cablata o wireless. Può esserci una connessione diretta tramite un cavo ethernet dal sistema DAQ al computer client, oppure possono essere collegati entrambi allo stesso router o sulla stessa rete.
Utilizzando Dewesoft NET, uno o più sistemi DAQ possono essere ricollegati a uno o più "client" di dati. I client sono semplicemente computer Windows in grado di controllare i sistemi DAQ, visualizzare i propri dati in tempo reale e/o scaricare interi file dati quando la memorizzazione è stata interrotta.
I client possono anche essere configurati solo per VISUALIZZARE i dati, ma non per controllare i sistemi DAQ. È inoltre possibile utilizzare una combinazione di client di controllo e visualizzazione. Quando i dati vengono trasmessi attraverso la rete ai client, vengono anche archiviati localmente sui sistemi DAQ per evitare la perdita di dati nel caso in cui la connessione TCP/IP venga interrotta. Se necessario, i dati possono essere trasferiti facilmente ai clienti dopo il test.
Ci sono tre configurazioni di base tra cui scegliere:
Modalità 1:1 - Sistema DAQ singolo e client singolo
Modalità x:1 - Più sistemi DAQ e un singolo client
Modalità 1:x - Sistema DAQ singolo e client multipli
Modalità 1:1 - Sistema DAQ Singolo e Client Singolo
La modalità 1:1 comprende un singolo sistema DAQ Dewesoft e un singolo computer client. Il sistema DAQ e il client sono collegati tramite protocollo TCP/IP a qualsiasi distanza.
Esistono due tipi di funzionamento: controllo remoto completo e solo visualizzazione dati.
In modalità CONTROLLO REMOTO COMPLETO, il computer client è il controller principale del sistema di misura. Accede direttamente alla schermata di configurazione del sistema DAQ e può avviare e interrompere la misura, configurare eventi trigger e altro ancora. È proprio come se l'utente fosse seduto di fronte al sistema DAQ che lo utilizza, tranne per il fatto che sta usando un computer diverso … e questo computer può essere posizionato proprio accanto al sistema DAQ OPPURE può essere a chilometri/miglia di distanza.
Nella modalità di SOLA VISUALIZZAZIONE, il sistema di misura acquisisce i dati, mentre il computer client può collegarsi ad esso e visualizzare i dati in tempo reale. Ma questo VIEW CLIENT non può controllare il sistema DAQ. Questo è l'ideale quando si desidera che un utente sia in grado di visualizzare i dati, ma non di controllare in alcun modo la misura. Un client VIEW può "guardare, ma non toccare".
Modalità x:1 - Più Sistemi DAQ e un Singolo Client


Quando l'applicazione richiede l'utilizzo di più sistemi DAQ, è possibile collegare più sistemi insieme. Devono essere sincronizzati insieme per garantire che i dati di questi sistemi siano allineati sull'asse del tempo.
Per raggiungere questo obiettivo, abbiamo bisogno di un clock interno o di un clock esterno. Con il clock interno, un sistema è il clock master e gli altri ricevono quel clock e si agganciano ad esso. Un semplice cavo SYNC viene utilizzato per collegare questi clock.
Oppure, possiamo utilizzare una sorgente di clock esterna come IRIG o GPS. Inoltre, tutti i sistemi DAQ devono funzionare alla stessa velocità di acquisizione dinamica. Ulteriori dettagli sulla sincronizzazione dell'ora assoluta sono disponibili nella parte successiva di questo documento.
Il computer client è sempre il master: avvia e interrompe la misura di tutti i sistemi DAQ nella rete. Inoltre, il client può VISUALIZZARE i dati di ogni singolo sistema DAQ durante la misura.
Modalità 1:x - Sistema DAQ Singolo e Client Multipli

La terza configurazione di rete prevede un unico sistema DAQ controllato da un MASTER CLIENT e VIEW CLIENT aggiuntivi. Il MASTER è in grado di modificare le impostazioni del sistema di misura, salvare il setup di misura, avviare e interrompere l'acquisizione e molto altro. I client VIEW possono visualizzare alcuni canali dal sistema DAQ e se lo desiderano possono memorizzare questi canali sui loro dischi rigidi locali. I client VIEW sono osservatori passivi: non possono controllare o interferire con il test.
Scopri di più:
Quindi, possiamo avere una rete di sistemi DAQ basati su computer sincronizzati tra loro o su una sorgente temporale assoluta come IRIG o GPS PPS.
Riferimento temporale assoluto
Abbiamo appreso che il master clock ad alta velocità all'interno di un dato sistema DAQ Dewesoft consente di acquisire e sincronizzare tutti i tipi di ingressi: analogici, digitali, ecc. con precisione hardware o software.
Abbiamo anche appreso che più sistemi DAQ Dewesoft possono essere collegati localmente e/o in remoto ed essere sincronizzati insieme utilizzando il clock di qualsiasi dispositivo che sia stato impostato come "master" all'interno del sistema. Ma cosa succede se abbiamo bisogno che il clock principale sia sincronizzato con un riferimento temporale assoluto?
Innanzitutto, abbiamo bisogno di una sorgente di clock esterna. I sistemi DAQ Dewesoft supportano quattro sorgenti di temporizzazione esterne:
IRIG timecode
GPS PPS pulse
EtherCAT PPS pulse
Sincronizzazione NTP SYNC
sincronizzazione PTP_V2 (SIRIUS XHS only)
IRIG timecode
I sistemi Dewesoft sono compatibili con diversi codici temporali IRIG. IRIG-B DC può essere immesso nel connettore SYNC. Altri codici IRIG possono essere inseriti utilizzando un'interfaccia IRIG esterna, come DS-GPS-CLOCK.


Quando si seleziona IRIG come sorgente di clock per il sistema, si ottiene un'accuratezza temporale assoluta di ~ 1 µs. IRIG è una parola in formato BCD che contiene non solo l'ora ma anche il giorno, il mese, l'anno, ecc. Questa è un'ottima modalità di sincronizzazione grazie alla sua accuratezza e precisione.
GPS PPS (impulsi al secondo)
I sistemi DAQ Dewesoft possono utilizzare il GPS PPS come riferimento temporale assoluto, senza alcun limite di distanza.
Ricevitori GPS di alta qualità e dispositivi IMU con GPS come quelli offerti da Dewesoft, forniscono tutti un'uscita PPS per la sincronizzazione temporale:
| DS-GPS-CLOCK | DS-VGPS-HS/HSC | DS-IMU1 | DS-IMU2 | |
|---|---|---|---|---|
| Uscita PPS output | Sì | Sì | Sì | Sì |
| Uscita IRIG B | Sì | No | No | No |
| Interfacce per il sistema DAQ | USB | RS232 / USB, CAN, Analogico, Digitale | USB, RS232 | USB, RS232 |
| Sistemi di Navigazione Supportati | GPS L1, GLONASS L1 | GPS L1, L2 GLONASS L1, L2 | GPS L1, GLONASS L1, GALILEO E1, BeiDou L1 | GPS L1, L2, L5 GLONASS L1, L2, GALILEO E1, E5, BeiDou B1, B2 |
| Principali Applicazioni | Sincronizzazione dell'ora, posizionamento base | Sincronizzazione oraria, posizionamento, prove freno, ADAS | Sincronizzazione temporale, unità di misura inerziale (rollio, beccheggio, imbardata) | Sincronizzazione temporale, unità di misura inerziale (rollio, beccheggio, imbardata) |
I ricevitori GNSS di terze parti che dispongono di un'uscita PPS sono anche in grado di lavorare come clock master all'interno dei sistemi DAQ Dewesoft, inclusi Topcon GNSS, Novatel GNSS, Racelogic V-BOX, Microsat e Dewetron V-GPS. Verificate sempre con il supporto tecnico Dewesoft per garantire la compatibilità.
EtherCAT PPS
I dispositivi Dewesoft EtherCAT possono essere sincronizzati con ECAT GPS Junction che supporta sia PPS da GPS che dispositivi di navigazione compatibili, nonché timecode IRIG. Questa interfaccia consente di sincronizzare tutti i dispositivi Dewesoft EtherCAT come KRYPTON e IOLITE su un riferimento temporale assoluto.

Sincronizzazione NTP
Nella sezione di configurazione del software DewesoftX, come sorgente di clock deve essere selezionata la sorgente di clock esterna e quindi si sceglie NTP come provider di clock. Nella finestra di dialogo aggiuntiva, andrà inserito l'indirizzo di uno o più server orari NTP. Questi sono collegati al sistema DAQ tramite ethernet. L'NTP non è preciso come i metodi IRIG o GPS PPS, ma è sufficiente per molte applicazioni.


| Tipo | Acc. | Ideale per | Compatibile con |
|---|---|---|---|
| IRIG Timecode | ~ 1 µs | Applicazioni stazionarie | Tutti i sistemi DAQ Dewesoft |
| GPS PPS | ~ 1 µs | Applicazioni mobili o fisse | Tutti i sistemi DAQ Dewesoft |
| EtherCAT PPS | ~ 1 µs | Applicazioni mobili o fisse | Tutti i sistemi Dewesoft EtherCAT |
| NTP | + 10 ms | Applicazioni stazionarie | Tutti i sistemi DAQ Dewesoft |
| PTP_V2 | ~ 1 µs | Applicazioni mobili o fisse | Sistemi Dewesoft SIRIUS XHS |
Sincronizzazione PTP_V2
I sistemi SIRIUS XHS possono essere sincronizzati sia utilizzando tutti i metodi menzionati sopra sia usando il PTP_V2 (ma non il vecchio PTP). Questo protocollo di temporizzazione avanzato, standardizzato in base a IEEE 1588-2008 e aggiornato in base a IEEE 1588-2019, non è retrocompatibile con la versione PTP precedente (IEEE 1588-2002). IEEE-1588 è un protocollo master/slave per la distribuzione di un clock tra dispositivi interconnessi.
L'intera rete PTP v2 può essere referenziata a qualsiasi sorgente di clock esterna (come IRIG, GPS PPS, NTP, ecc.) in modo che tutti i dispositivi sulla rete siano referenziati a quell'orologio. PTP v2 è stato adottato con entusiasmo da fornitori di servizi di transazione finanziaria, operatori di telefoni cellulari, sistemi di distribuzione dell'energia e altre reti che richiedono una precisione temporale migliore rispetto NTP, ma che potrebbero non avere un facile accesso al GPS PPS.
Quando si dispone di più dispositivi SIRIUS XHS, è possibile utilizzare un provider di clock esterno come dispositivo PTP o Dewesoft DAQ (clock slave) come sorgente di clock PTP.
Riepilogo
In questo articolo, hai appreso come tutte le sorgenti dati collegate a un singolo sistema DAQ Dewesoft vengono sincronizzate insieme. Per la sincronizzazione alcuni usano la sincronizzazione hardware e altri usano il software.
Hai anche imparato come più sistemi DAQ Dewesoft possono essere collegati insieme per creare un sistema DAQ distribuito, pur mantenendo la sincronizzazione tra tutti i canali di più sistemi.
Abbiamo mostrato come l'architettura distribuita Dewesoft NET può essere utilizzata per diffondere questi sistemi di acquisizione dati su un'area molto ampia, anche a chilometri/miglia di distanza l'uno dall'altro.
Infine, abbiamo mostrato come utilizzare una delle numerose interfacce possibili per fornire sistemi singoli o multipli con un riferimento a una sorgente temporale assoluta.
Dicono che "il tempismo è tutto" e questo è più che vero nell'acquisizione dati!