




Analisi del rumore di fondo: L’importanza della qualità della catena di misura in ingegneria civile

Gabriele Ribichini & Emanuele Burgognoni
June 1, 2022
Misurare le forze ambientali che influiscono sulle strutture può essere complicato. La catena di misura deve essere ben composta e accuratamente dimensionata per ottimizzare il rapporto segnale/rumore, tuttavia, l'evoluzione tecnologica pervade ogni singola applicazione di test. Anche la strumentazione di misura ad alte prestazioni e potenti software di analisi a prezzi accessibili hanno cambiato sostanzialmente l'approccio dell'ingegneria civile.
Introduzione
L’evoluzione tecnologica pervade ogni singola applicazione. La strumentazione di misura ad alte prestazioni ed i potenti software di analisi a prezzi accessibili, hanno cambiato in maniera sostanziale anche l’approccio dell’ingegneria civile.
L’analisi modale è il tipo di indagine dinamica che richiede un trattamento di altissimo livello del segnale analogico. A differenza del monitoraggio dinamico, il cui scopo è di definire le vibrazioni massime percepite dalla struttura, l’analisi modale operativa (OMA) richiede un’accurata analisi dei segnali di piccola entità, tipicamente generati dal rumore ambientale e non da sollecitazioni imposte (come nel caso del Modal Test). Misurare dei segnali di piccola entità è spesso difficile. Senza un accurato dimensionamento dei vari componenti utilizzati nella catena di misura per l’ottimizzazione del rapporto segnale-rumore (SNR), è molto facile trovarsi nella condizione in cui le ampiezze dei segnali di vibrazione dal rumore ambientale hanno ampiezza paragonabile o persino inferiore a quelle del rumore elettrico dello strumento.
Tra i vari trasduttori utilizzati, è molto comune incontrare gli accelerometri; dispositivi che convertono le accelerazioni in un segnale elettrico, misurabile con gli strumenti di acquisizione dati.
I segnali generati dagli accelerometri richiedono molteplici step di amplificazione e filtraggio. Alcuni tipi di sensori sono progettati per avere un output già amplificato grazie a della circuiteria integrata all’interno del dispositivo, mentre altri si limitano a fornire il segnale generato direttamente dall’elemento sensibile, obbligando all’uso di particolari cablaggi ed elettroniche di trattamento del segnale. Tutti questi dettagli devono essere valutati attentamente in fase di configurazione di un sistema di misura, tenendo in considerazione che l’hardware dell'acquisitore è parte della catena del trattamento del segnale.
Un segnale non adeguatamente condizionato o digitalizzato porta inevitabilmente a dei risultati non coerenti con lo stato della struttura analizzata. In questo campo dell’ingegneria è, perciò, importante lavorare con strumenti che siano caratterizzati da bassi valori di noise floor, un elevato rapporto segnale-rumore (SNR) ed un'elevata dinamica al fine di percepire le ampiezze più piccole ed introdurre il minor numero di impurità lungo il percorso di elaborazione del segnale. Va sottolineato che non possiamo misurare nel dettaglio segnali la cui ampiezza media sia al di sotto del rumore di background (Noise floor), perciò è rilevante che la scelta dell’hardware sia effettuata con cura in funzione di tali parametri.

 da un’elettronica analogica di condizionamento del segnale, da un convertitore A/D (analogico-digitale) e da un sistema di trattamento dei dati (elaborazione, memorizzazione e visualizzazione)")
Le analisi dinamiche in Ingegneria Civile sono, per loro natura, un ottimo banco di prova per la strumentazione di acquisizione dati poiché richiedono un ottimo trattamento del segnale ed un elevato grado di sincronizzazione dei canali acquisiti. Un trattamento del segnale poco performante è spesso causa di rumore elettrico sovrapposto al segnale utile. Ciò rende problematiche le analisi post acquisizione o peggio, porta all’impossibilità di ottenere risultati dall’elaborazione del modello finale.
Tale scenario è molto frequente nel campo civile, ma sebbene il rumore sia un tema cruciale in fase di analisi non risulta però un fattore pericoloso per l’analisi dei dati tanto quanto l’assenza di una perfetta sincronizzazione dei sitemi usati per le analisi. La caratterizzazione dinamica di una struttura ha come obiettivo indiretto quello di portare l’ingegnere o il progettista a scegliere se effettuare opere di consolidamento o limitare l’analisi alla stesura di un report dello stato della struttura stessa. Qualora fosse necessario svolgere opere di adeguamento, si andrebbe incontro al rischio di compromettere l’integrità strutturale operando sulla base di errati modelli elaborati dai dati acquisiti in assenza di una perfetta sincronizzazione.
Nel caso peggiore verrebbe minata non solo la solidità del complesso, ma anche l’incolumità di chi vi risiede al suo interno. E’ per tale ragione che si preferisce adoperare sistemi cablati, ove la sincronizzazione viene garantita al microsecondo. I sistemi wireless, oltre che non permettere tempi di sync inferiori a pochi millisecondi, richiedono l’utilizzo di batterie che non possono avere lunga durata se il sistema acquisisce segnali dinamici e trasmette dati in streaming.
E’ proprio per venire incontro a tali esigenze che sono stati sviluppati i moduli di acquisizione dinamica IOLITE 3xMEMS-ACC di Dewesoft. Si tratta di dispositivi all-in-one dotati di sensore e acquisitore integrati all’interno di un unico case. Questi sistemi sono scalabili e offrono elevati gradi di sincronizzazione che raggiungono il microsecondo. Si tratta di sistemi cablati con un’architettura pensata per ottimizzare il cablaggio in applicazioni di monitoraggio di grandi opere; un unico cavo porta alimentazione, dati e sincronia.
La concatenazione dei moduli permette di ridurre al minimo la quantità di cavi. Inoltre, l’utilizzo di cavi UTP CAT6 con connettori RJ45, consente di realizzare cablaggi molto economici con materiale altamente disponibile presso i distributori standard per impianti elettrici.


Un ulteriore fattore di grande rilevanza è dato dalla frequenza di campionamento. Sebbene l’ingegneria civile richieda un’analisi delle bande di acquisizione molto basse, risulta molto utile lavorare in condizioni di oversampling per la ricostruzione fedele del segnale analogico originale nel dominio del tempo. Grazie a questa tecnica è possibile ottenere una maggiore pulizia della banda spettrale interessata nell’analisi riducendo le problematiche relative al rumore di quantizzazione.
Il rispetto del principio di Nyquist-Shannon in fase di campionamento non è una condizione sufficiente a preservare una buona qualità del segnale, ma ha il solo scopo di prevenire il fenomeno dell’Aliasing. I sistemi che operano nel mantenimento di solo tale principio, risultano essere affetti da elevati valori di rumore di quantizzazione crescenti nell’acquisizione delle armoniche a frequenze più elevate in prossimità del limite superiore di banda. Il rumore di quantizzazione è ciò che introduce buona parte dei disturbi in questa fase del processo di conversione e porta ad un valore di SNR più basso all’interno della banda di osservazione.
Per migliorare la risoluzione del segnale è necessario affrontare con cura la scelta dell’hardware in funzione di 3 fattori: la tipologia di ADC integrato, la frequenza di campionamento disponibile e i ma filtri disponibili per la pulizia del segnale. In questo campo, dove si predilige la qualità rispetto alla velocità di campionamento, risulta importante affidarsi ad una tipologia di convertitore analogico-digitale di alte prestazioni.
The Sigma-Delta technology proves to be the most suitable choice when compared with the faster but less precise counterpart of the SAR type since the sampling process used by the first operates on an oversampling principle even 100 times higher than the sampling rate set. Observations of this kind can be crucial in choosing a single element of the acquisition chain, even more so for dynamic investigations.
ILa tecnologia Sigma-Delta si dimostra la scelta più idonea posta al confronto con la controparte più rapida ma meno precisa di tipo SAR poiché il processo di campionamento adoperato dal primo opera su di un principio di oversampling anche 100 volte superiore al sampling rate impostato. Osservazioni di questo genere possono rivelarsi cruciali nella scelta di un singolo elemento della catena di acquisizione, a maggior ragione per le indagini dinamiche.
Nella dinamica strutturale le Modal Tests hanno come obiettivo primario l’identificazione di tre parametri che, nel loro complesso, descrivono la risposta comportamentale di una struttura alle vibrazioni: frequenza di risonanza, coefficienti di smorzamento e forme modali. Per poter svolgere tale analisi si fa uso di due metodi EMA (Experimental Modal Analysis) e OMA (Operational Modal Analysis), scelti in funzione delle condizioni di contorno dell’indagine. Entrambe le analisi saranno orientate a stimolare la banda di frequenze alla quale la struttura presenterà la risonanza (definite anche frequenze naturali o proprie) per poi identificare l’esatto valore alle quali subentrano gli effetti di risonanza vibrazionale. Nel metodo EMA si fa uso di una forzante artificiale, come gli shaker per le strutture, i gravi in caduta per i solai e i martelli strumentati per le catene, i tiranti e i solai.

Qualora non sia possibile imporre una tale forzante, per l’assenza della strumentazione o per la critica condizione della struttura, allora si può fare riferimento alla metodologia OMA, grazie alla quale sarà possibile identificare le frequenze naturali per mezzo del rumore ambientale. Questo processo di analisi avviene con maggiore difficoltà rispetto al precedente poiché le condizioni imposte dal punto di vista vibrazionale non sono note (output only). Una parentesi importante va aperta sul concetto di identificazione delle forme modali e sulla sua differenza con la semplice analisi ODS.


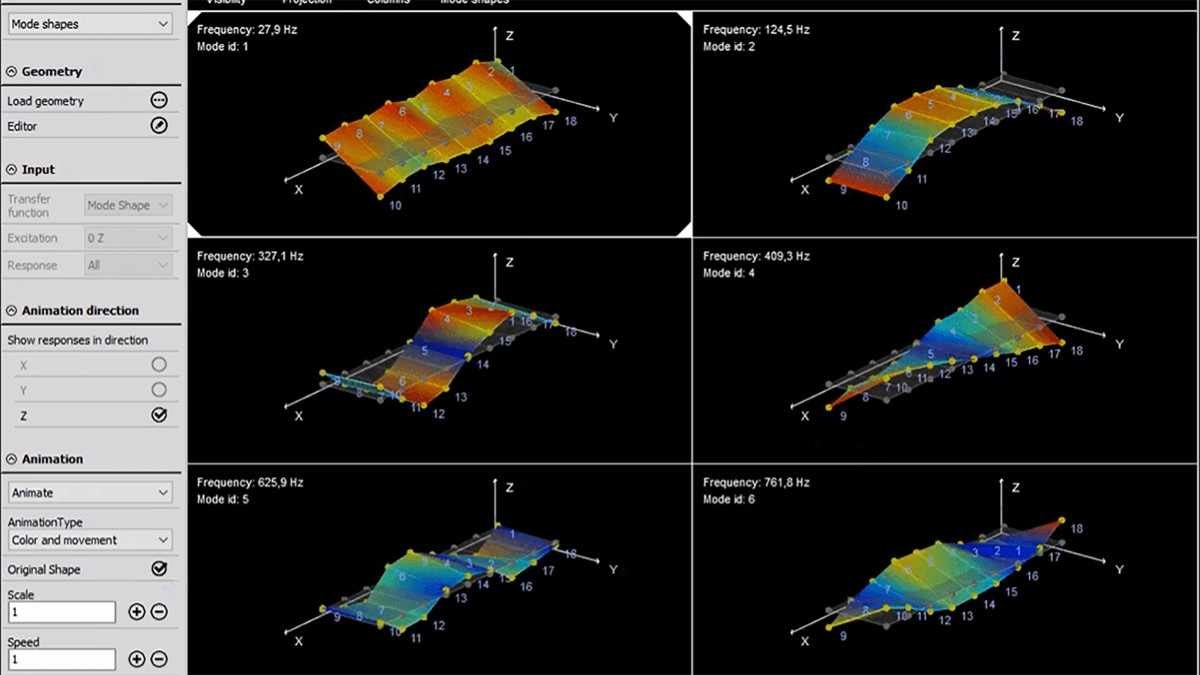
La Operational Deflection Shapes nel dominio del tempo (appunto time domain ODS) mostra graficamente gli spostamenti della struttura ricostruiti per mezzo dei dati acquisiti dai canali sincronizzati, ma non fornisce un'idea della presenza di modi similari o della massa partecipante per ognuna delle frequenze identificate. L’estrazione delle forme modali deve passare per un processo di validazione caratterizzato dall’utilizzo di vari algoritmi non contemplati nella semplice ODS.
L’esecuzione di un’acquisizione delle vibrazioni per processare un’analisi OMA richiede particolari attenzioni poiché il rumore della strumentazione potrebbe essere molte volte superiore alle grandezze accelerometriche che si vogliono acquisire. Per tale ragione è importante affrontare un focus sulla qualità dei componenti hardware adoperati per la conversione dell’informazione da analogica a digitale e come questi influenzano il processo di acquisizione all’interno della catena di analisi.
Rumore di fondo e Dinamica Totale
La densità spettrale di rumore (Spectral Noise), viene definita da complesse funzioni matematiche della teoria dei segnali e rappresenta in pratica la potenza del rumore del sistema (ADC + condizionamento analogico) distribuito in banda. L’unità di misura è µg/√Hz.
Un buon accelerometro come il PCB 393B12, ampiamente utilizzato in ingegneria civile, ha una densità spettrale di rumore di circa 1.30 µg/√Hz ad 1 Hz con valori decrescenti al crescere della frequenza.
La densità spettrale è una unità di misura molto comoda per definire il rumore quando si analizzano bande in frequenza diverse. E’ infatti sufficiente integrare il valore di densità spettrale nella banda di interesse per avere il rumore RMS (rumore di fondo che si confonde con le vibrazioni ambientali).
L’accelerometro 393B12 ha un “rumore di fondo” dell’ordine di 10 µg in una banda che va da 0 a 10Hz
Lo stesso accelerometro, mostra un livello di rumore (Noise Floor) diverso se si analizzano bande di frequenza diverse, per questo motivo è importante utilizzare un corretto filtraggio analogico del segnale che limiti al minimo la presenza di segnali senza contenuto informativo utile.
I sistemi Dewesoft integrano un’ampia selezione di filtri passa basso, con diverse frequenze di taglio e diverse caratteristiche per ottimizzare lo strumento nella maggior parte delle applicazioni.
Un’altro parametro molto importante è la Dinamica Totale del canale di acquisizione (Dynamic Range) che rappresenta in scala logaritmica (dB) il rapporto tra il fondo scala ed il rumore di fondo (limite inferiore).
Avendo un bassissimo rumore di fondo, gli accelerometri sismici presentano una dinamica totale molto alta, normalmente ben superiore ai 100 dB.
Risulta quindi fondamentale utilizzare strumentazione di acquisizione dati con una dinamica adeguata >>100 dB per evitare di introdurre delle limitazioni alle qualità del trasduttore utilizzato.
La famiglia di acquisitori Dewesoft implementano la DualCoreADC technology, considerata come l’ultima frontiera nell’acquisizione dati. La potenza di ben due convertitori a 24 bit viene combinata per raggiungere dinamiche totali fino a 160 dB. Performance indispensabili per acquisire i segnali degli accelerometri più performanti.
Analisi delle componenti del rumore
Tutto il processo inerente il trattamento del segnale acquisito dai sensori è soggetto all’introduzione di una componente di informazioni non utile allo scopo dell’analisi. Questa componente viene definita “rumore” e caratterizza tutta la catena di acquisizione. Consideriamo un sistema costituito da sensori piezoelettrici con uscita in carica, un dispositivo DAQ che opera anche da circuito di interfacciamento e condizionamento per il trasduttore e infine un pc dedicato alla configurazione del sistema e allo storage dei dati.
La prima potenziale fonte di rumore è rappresentata dallo stadio di interfacciamento tra il sensore e il DAQ. In questo stadio della catena il segnale analogico è identificato dalle cariche generate dall’elemento piezoelettrico interno al trasduttore che si ridistribuiscono sul cristallo in funzione dell’accelerazione percepita. Questa forma di segnale è molto debole e presenta una bassissima reiezione ai disturbi.
La conversione del segnale in una differenza di potenziale è realizzabile solo se le cariche generate raggiungono l’amplificatore prima che il cristallo si scarichi e ridistribuisca uniformemente tali cariche al suo interno. Per lavorare in buone condizioni di segnale è necessario predisporre di uno stadio d’ingresso del DAQ ad altissima impedenza. E’ inoltre importante evitare l’introduzione di disturbi di tipo triboelettrico ed elettromagnetico con dei cavi di collegamento che presentino le seguenti caratteristiche: lunghezza limitata, rigidità meccanica e isolamento elettromagnetico.
Nello stadio successivo il DAQ svolge le sue funzioni di acquisizione e conversione del dato. Il segnale incontra a questo punto nuove problematiche legate ai componenti elettronici che, per loro natura, introducono forme differenti di rumore che nel gergo vengono definite come “Termico”, “Shot” e “Flicker”. Il loro approfondimento non è lo scopo di tale articolo, ma la loro considerazione vuole solo mettere alla luce tutti i fattori che potenzialmente entrano in gioco nel compromettere quello che diverrà poi il dato finale. Ognuno di queste tipologie di rumore “sporca” il segnale utile introducendo armoniche in una determinata banda dello spettro, rendendo così la lettura dello stesso molto difficile.
Il processo di conversione dell’ADC introduce un ulteriore fonte di rumori che per natura sono legati al campionamento e alla ricostruzione del segnale. Durante la quantizzazione viene introdotto il rumore in due modi:
Errore di quantizzazione: originato dalla ricostruzione di ogni singola armonica del segnale con un numero finito di campioni. Il risultato è la ricostruzione di ogni armonica come un’onda segmentata che introduce armoniche nello spettro in frequenza.
Distorsione di quantizzazione: causato da una riduzione della risoluzione del segnale analogico per approssimazione dell’ampiezza al valore discreto più vicino.
Poiché non è possibile ricostruire perfettamente un segnale analogico dal suo equivalente digitale, il rumore di quantizzazione sarà sempre presente. In molte applicazioni di elaborazione è desiderabile ottenere quante più informazioni possibili sul segnale per ridurre il rumore il più possibile.
Esistono due modi comuni per ridurre il rumore di quantizzazione: operare in over-sampling sul segnale in ingresso oppure utilizzare un algoritmo che riduce gli effetti della quantizzazione. L’architettura integrata negli acquisitori Dewesoft applica entrambe le metodologie di riduzione degli effetti di quantizzazione per ottenere un segnale il più possibile fedele all’originale analogico.




L’onda triangolare rappresenta un esempio calzante delle armoniche introdotte dalla segmentazione di un’onda durante il processo di ricostruzione del segnale. Le armoniche al di sotto della principale contribuiscono a generare il rumore nella cosiddetta forma di errore di quantizzazione. Il “noise floor” è così composto dal contributo di tutti questi fattori che nel corso di tutta la catena di acquisizione influenzano il sistema.
Il parametro chiave con il quale si attribuisce il grado di rumorosità di un segnale è il suo valore RMS. Si definisce RMS il contributo energetico di un segnale all’interno di una determinata banda di frequenze. Viene determinato integrando la funzione della densità spettrale di potenza nell’intervallo di frequenze osservabili. La banda di frequenze osservabili di norma è definita dalla frequenza di Nyquist, ovvero la metà della frequenza di campionamento. Dewesoft adotta algoritmi differenti operando in sovracampionamento, perciò la banda osservabile nei moduli Dewesoft può variare da ¼ ad 1/3 della frequenza di campionamento.

.")
Più si diminuisce l’intervallo di integrazione, più si osserva lo specifico contributo del rumore in una determinata sotto-banda di osservazione. Nell’ingegneria civile si richiede molte volte una risoluzione spettrale di 0.1Hz poiché il segnale utile risulta concentrato alle basse frequenze. Dal punto di vista computazionale il calcolo dei valori RMS di tutto lo spettro richiede un tempo dato dall’inverso della risoluzione in frequenza. Perciò un dettaglio troppo elevato porta ad un lento aggiornamento dello spettro. Nel caso di 0.1Hz di risoluzione sono necessari 10 secondi per ogni elaborazione.


La strumentazione presente nel mercato viene valutata per mezzo di vari parametri legati al rumore. Tra questi troviamo: il “Dynamic Range”, il “Noise Floor” e il rapporto “SNR”.
Il Dynamic Range esprime il rapporto tra il valore massimo e minimo del segnale percepito non distorto. Il suo corrispettivo in scala logaritmica viene espresso in dB e fornisce l’intervallo in funzione dell’energia massima e minima percepibile. Questo parametro è cruciale in applicazioni come quelle del campo civile poiché il segnale acquisito subisce variazioni molto grandi in funzione della forzante in atto. Prendiamo in esempio un ponte sotto caratterizzazione dinamica. Gli spostamenti sono molto piccoli e le accelerazioni sono minime, quasi in prossimità dei valori di fondo del noise floor. Una vettura si accinge all’attraversamento del ponte passando in prossimità dei sensori e il segnale in accelerazione subisce una rapida escursione da valori dell’ordine di 10^(-5)g a 10^(-1)g. Un fattore 10000 separa per intensità i due attimi di acquisizione e, senza una dinamica elevata del dispositivo, il risultato porterebbe alla perdita di informazioni per distorsione del segnale.
Il Noise Floor (definito alle volte anche “Residual Noise”) rappresenta la somma di tutte le componenti non facenti parte del segnale utile.
Il Signal-to-Noise Rapport (SNR) viene espresso in dB come rapporto tra il segnale utile e quello non, in correlazione ad una determinata frequenza di campionamento. E’ un parametro a stretto contatto con il Noise Floor ed è indice di elevate prestazioni per la strumentazione.
I sistemi Dewesoft offrono le linee di prodotti DualCoreADC ottimizzate per il trattamento dei segnali con elevata dinamica, dove è richiesto un elevato SNR e un basso valore di Noise Floor. La tecnologia implementata sfrutta ben due ADC Delta-Sigma a 24 bit con tecniche di oversampling e filtraggio per la riduzione dell’errore di quantizzazione. I risultati raggiunti portano a dispositivi con dinamiche molto elevate.
Varie tecnologie di ADC a confronto
Il nostro lavoro è quello di aiutare la scelta della tecnologia giusta per ogni applicazione.
Abbiamo svolto dei test con l’obiettivo di verificare in laboratorio i livelli del rumore introdotto dai vari moduli di acquisizione Dewesoft. A tal fine sono stati presi in considerazione alcuni modelli con architetture differenti per confrontare sulla carta e sul campo le prestazioni in modo da confermare le differenze sul trattamento del segnale. (Vedere i parametri relativi al rumore dei vari modelli Dewesoft nelle figure 9-13).










Sebbene molti acquisitori sfruttano un’architettura di campionamento costruita intorno al convertitore Delta-Sigma, non tutti i moduli presentano lo stesso rapporto tra il segnale e il rumore. Questo perché l’ottimizzazione degli stadi di ingresso viene svolta sul tipo di sensore che il modulo è predisposto a supportare. Filtri e sovracampionamento fanno parte dei fattori che insieme al sensore definiscono la qualità del segnale acquisito. Ovviamente non ci si può aspettare, ad oggi, che un sensore MEMS abbia una precisione paragonabile a quella di un sensore piezoelettrico, ma in certe condizioni è necessario predisporre dei vantaggi offerti da una tecnologia piuttosto che da un’altra. Comunque i moderni sviluppi stanno spingendo la tecnologia MEMS a sfiorare livelli di rumore di banda al di sotto del valore di 1 ug/√Hz.
Dalle schede tecniche il modello SIRIUS HS 8xLV risulta il più carente nei rapporti tra il segnale e il rumore. I motivi sono legati all’architettura SAR a 16 bit e all’assenza di tecniche di oversampling utili a diminuire l’errore di quantizzazione e il rumore ad esso correlato. In assenza di tutti questi fattori il noise floor al di sotto dei 10 kHz risulta essere intorno a 100 dB. Tutt’altro discorso può essere fatto per il SIRIUS 8xACC che dispone di tutti quegli stadi di ottimizzazione del segnale che il modello HS non possiede.
Volgiamo per un attimo l’occhio sull’architettura che caratterizza i convertitori integrati all’interno di questi moduli. La teoria ci suggerisce che la tecnologia SAR rappresenta la scelta meno appropriata per questo settore a causa della sua scarsa predisposizione al dettaglio. Sebbene non rappresenti uno dei migliori ADC disponibili nel mercato la sua economica natura lo porta ad essere molto sfruttato nel mondo della misura.
Odierni sviluppi hanno portato alla creazione di convertitori SAR con una risoluzione di 24 bit, mantenendo i punti di forza legati al lato economico e alla velocità di acquisizione. La sua architettura semplice lo rende un convertitore molto veloce, capace di rispondere bene a tipologie di segnale di vario genere sia naturale che “artificiale” [onde quadre, triangolari, …].
I convertitori Delta-Sigma invece sono orientati alla precisione e al dettaglio sostentati da tecniche di oversampling e filtraggio ad hoc tramite filtri DSP. L’errore e la distorsione di quantizzazione sono tra le principali potenzialità di questa tecnologia poiché risultano veramente di bassa entità grazie al sovracampionamento dei segnali, ben al di sopra dei criteri di campionamento di Nyquist-Shannon. Il segnale digitalizzato subisce un'ulteriore fase di pulizia grazie al secondo sistema di filtraggio sul bit-stream in output effettuato tramite filtri DSP low-pass.




Un altro fattore che spinge la tecnologia Delta-Sigma è l’elevata dinamica grazie alla quale è possibile digitalizzare segnali che presentano forti variazioni tra i valori massimi e minimi. La tecnologia DualCoreADC sviluppata da Dewesoft amplifica le potenzialità della dinamica offerta dagli ADC di tipo Delta-Sigma combinando l’azione di due ADC con un differente livello di guadagno. La funzione è quella di elaborare il segnale in ingresso di bassa entità con il convertitore a guadagno più elevato e re-indirizzare il segnale con maggiore intensità sull’ADC a guadagno minore per evitare il cut-off dei massimi valori dovuto alla sovramodulazione dei valori in ingresso. Grazie a tali caratteristiche è possibile raggiungere valori di Dynamic Range di 160 dB e un SNR di 125 dB.


La strumentazione Dewesoft che monta la tecnologia DualCoreADC è la “Sirius High Dynamic series” ed è il fulcro dei test effettuati all’interno di questa analisi per il confronto delle prestazioni dei vari hardware. Per ottenere un evidente paragone degli effetti del rumore di quantizzazione sul noise floor sono state effettuate acquisizioni tra i modelli Sirius High Speed, che integrano ADC di tipo SAR a 16 bit e i Sirius High Dynamic con i DualCoreADC ΔΣ a 24 bit.




I risultati dei test sono dunque quelli mostrati di seguito (fig. 19-23), dove si specifica il valore RMS del rumore calcolato in una banda spettrale compresa tra 0,2 Hz e 100 Hz.










Come ci si poteva aspettare i valori di noise floor minimi si hanno con il SIRIUS 8xACC grazie al quale è possibile svolgere analisi accelerometriche anche in condizioni di forte rigidità della struttura. Le analisi dinamiche possono comunque essere svolte con i restanti moduli, ma all’atto pratico si avrebbero problemi qualora la struttura sotto analisi fosse fortemente rigida. In tal caso le micro accelerazioni sarebbero coperte dai livelli di rumore.
Vari trasduttori a confronto
Per cercare di dare una evidente chiave di lettura dei vantaggi offerti dalla sensoristica in commercio sono stati svolti dei test mediante due dei trasduttori più precisi nel campo della dinamica strutturale, gli accelerometri IEPE e i trasduttori servo-meccanici (noti anche come Force Balance Accelerometers o FBA).
Seppur non accomunati dalla stessa natura di funzionamento, entrambi i trasduttori forniscono un output proporzionale all’accelerazione percepita dal sensore, con la grande differenza che il condizionamento del segnale di output a carica dell’elemento piezoelettrico rende il primo sensore incapace di misurare le accelerazioni costanti, mentre il servo-meccanico non presenta questo limite.
La spiegazione di ciò risiede nel comportamento capacitivo del cristallo piezoelettrico. Quando si applica uno stress meccanico dovuto all’applicazione di una forza sul cristallo si genera una differenza di potenziale per lo spostamento delle cariche al suo interno. Queste cariche hanno un tempo di vita imposto dallo stesso processo di scarica di un condensatore, la cui costante di tempo è dettata sia dalle proprietà resistivo-capacitive del cristallo stesso ma soprattutto all’impedenza del sistema di misura.
All’applicazione di una forza costante, come quella di gravità, il segnale rappresentato dalle cariche libere si perde velocemente. Una volta che le cariche si ridistribuiscono non è più possibile determinare l’entità della forzante che le ha generate, ragion per cui le accelerazioni che tendono ad avere una frequenza prossima allo zero non vengono lette dal sensore IEPE.
Caso opposto è quello del Force Balance la cui accelerazione è determinata dallo spostamento di massa sismica presente al suo interno. Ancorata da molle e immersa in un fluido, la massa rimane in un equilibrio molto delicato fintanto che la bobina che la circonda non viene alimentata e la corrente non serra la massa con la forza applicata dal campo elettromagnetico generato.
Una volta stabilizzato il campo, la massa rimane in equilibrio grazie alla componente magnetica della bobina. Al variare della forza agente sulla massa varia la corrente interna alla bobina, la quale rimane però costante in assenza di ogni spostamento. Per tale motivo i trasduttori servo-meccanici sono sensibili alle forze costanti e/o prossime alla frequenza zero.
Conclusioni
Per applicazioni che coinvolgono strutture grandi e rigide, la strumentazione Dewesoft più adatta è rappresentata dai Sirius con i canali BNC dedicati agli accelerometri IEPE. I filtri di accoppiamento sono definiti in frequenza a 0,1 Hz, fornendo la possibilità di acquisire con trasparenza e precisione i modi di vibrare già da 0.5Hz (pur se con ancora qualche distorsione).
L’acquisizione dei segnali con filtri HP così bassi è molto importante per analizzare le frequenze tipiche delle strutture, anche se la maggior parte dei sistemi in commercio sono dimensionati per frequenze più alte. Nel caso di filtri passa alto a 0,5 Hz i segnali verranno affetti da non trascurabile sfasamento fino a 5Hz (una decade sopra). Anche se i filtri adoperati presentano un Roll-Off molto ripido, una frequenza di taglio di 0.5Hz compromette l’integrità dei segnali acquisiti proprio nella banda di maggiore interesse per l’ingegneria civile.
Nel caso in cui sia richiesta una elevata sensibilità il PCB393B12 risulta essere uno dei sensori più adatto all’analisi. Grazie alla sua sensibilità di 10V/g è possibile percepire le vibrazioni più esili senza che queste si perdano nel rumore di fondo. La stessa cosa vale per il modello PCB393A03, sebbene presenti una sensibilità di un ordine inferiore (1V/g) e quindi risulti meno pratico in situazioni di forte rigidità strutturale.
Il Force Balance invece ha prestazioni di rumore di fondo similari (quando alimentato con eccitazione fortemente stabilizzata) e rimane la scelta da preferire quando le frequenze da analizzare sono inferiori a 0.5Hz, in quanto può essere acquisito senza filtri passa alto e quindi il segnale viene preservato a qualsiasi frequenza.