




Misura di RPM, angolo e velocità utilizzando sensori digitali, encoder e contatori

May 5, 2020
In questo articolo vedremo come misurare segnali digitali, encoder digitali, tachimetri e sensori RPM con i migliori sistemi di acquisizione dati (DAQ) di oggi, con dettagli sufficienti per:
Apprendere il funzionamento di questi sensori
Scoprire come i sensori digitali vengono sincronizzati con i dati analogici
Imparare ad usarli nei tuoi test
Pronto per iniziare? Iniziamo!
E' cosa nota a tutti gli ingegneri che i sistemi di acquisizione dati vengono utilizzati per misurare segnali temporali come tensioni, temperature e correnti, le vibrazioni rilevate dagli accelerometri, la deformazione rilevata dai sensori estensimetrici con collegamento a ponte di Wheatstone e altro ancora.
Ma spesso è necessario misurare eventi discreti e segnali di rotazione angolare che sono sincroni con i più comuni dati temporali. Gli eventi discreti sono quegli eventi che hanno solo due valori possibili, ad es. interruttori on/off, ecc.
Questi sono anche chiamati "segnali digitali" poiché sono fondamentalmente composti da stati di tensione alto-basso (noti anche come "on/off"). Nelle sezioni che seguono, presenteremo alcuni esempi di questi tipi di segnali aggiuntivi e vedremo come vengono misurati e sincronizzati al meglio con il resto dei dati.
Cosa sono i Segnali Discreti / Segnali Digitali?
Prendiamo il caso di un interruttore o sensore di prossimità, che emette una tensione bassa (nell’esempio seguente 0 V) quando l'unità in prova (UUT) non è vicina, ma poi emette una tensione più alta (5 V) quando l'UUT rientra nell'intervallo . Potrebbe essere necessario registrare questo stato discreto in sincronia con il nostro sistema di misura per contestualizzare i dati analogici. Come possiamo farlo?


Un modo semplice è prendere questi segnali elettrici e inviarli all'ingresso di un solo canale analogico del sistema di misura. Ma se invece avessimo bisogno di registrare gli stati di otto sensori di prossimità... o dieci... o più?
In tal caso, sarebbe un enorme spreco utilizzare i nostri ingressi analogici, per segnali discreti così semplici. Inoltre, a volte gli ingressi discreti richiedono una larghezza di banda maggiore di quella che gli ingressi analogici, relativamente lenti, possono supportare. Quindi, anche in questo caso, un ingresso analogico potrebbe non essere una buona soluzione a prescindere.
Quando è necessario acquisire più segnali discreti, risulta efficiente e molto meno costoso, utilizzare un ingresso digitale progettato per questo compito. Nel caso dei sistemi DAQ Dewesoft come la linea di prodotti SIRIUS, ogni ingresso counter può gestire una varietà di sensori con uscite digitali discrete come contatori ed encoder, nonché un numero di ingressi digitali discreti.
E poiché i counter/encoder in genere funzionano ad una velocità molto elevata, hanno bisogno di una banda piuttosto ampia (circa 102,4 MHz). I sistemi di acquisizione dati Dewesoft che forniscono per i counter/encoder una larghezza di banda di 10 MHz, molto al di sopra dei tipici ingressi analogici.
Il più semplice degli ingressi digitali è il tipo di segnale on/off, che appare come un'onda quadra. Questi sono a volte indicati come "canali discreti" o "canali evento". Poiché hanno solo due stati, sono spesso usati per mostrare lo stato di una porta aperta o chiusa, o un circuito acceso o spento.
Cos'è un Segnale TTL?
Gli ingressi discreti sono normalmente emessi da un relè o trasduttore a livelli TTL (transistor to transistor logic), che si basano su un pull-up a 5V. La teoria ci dice che, il segnale on/off TTL perfetto sarebbe 0V che rappresenta l' "OFF" (che significa un valore digitale di 0) e 5V che rappresenta l' "ON" (che significa il valore digitale di 1). Tuttavia, nella pratica, è quasi impossibile ottenere tale precisione, quindi gli intervalli accettabili sono diventati da 0 a 0,8 V per OFF e da 2 V a 5 V per ON.


Ingressi digitali/discreti Dewesoft
Gli ingressi contatore/encoder di Dewesoft forniscono tre ingressi che possono essere utilizzati come ingressi discreti/digitali. Alcuni modelli forniscono anche linee DI (ingresso digitale) dedicate, separate dagli ingressi contatore.
Cos'è un Contatore o un Encoder?
Contatori ed encoder si occupano del conteggio degli impulsi. Ma perché? Molto spesso vengono utilizzati per misurare l'angolo o la posizione angolare.
Ad esempio, il volante della tua auto: è importante sapere esattamente in che direzione viene sterzata l'auto in tempo reale. Quindi un encoder all'interno del volante divide i 360° di rotazione in migliaia di passaggi discreti. È inoltre configurato in modo tale che la posizione di massima sicurezza (sterzando in avanti) si trovi a un valore di posizione di rotazione noto.
Tutte le odierne funzioni di sicurezza e prevenzione delle collisioni, nonché le funzioni di guida autonoma su autovetture, veicoli agricoli e altro, si basano su questo encoder per conoscere l'esatta posizione del volante in ogni momento.
Ma a poca distanza dal nostro volante c'è una manopola sul cruscotto che vi permette di cambiare il volume della radio o passare a un canale diverso. Questo quadrante è in realtà un encoder con un'uscita digitale che alimenta un microcontrollore che legge la posizione dell'encoder che hai selezionato e ti consente di scorrere le possibili scelte, in entrambe le direzioni.
Di solito, l'encoder del volume è impostato con una posizione di inizio e fine, mentre l'encoder per il cambio di canale può girare intorno a tutte le stazioni. Queste sono solo tre applicazioni di codifica che la maggior parte delle persone usa ogni giorno nelle proprie automobili.
Applicazioni di Contatori e Encoder
I sensori di posizione e di posizione angolare presentano un'ampia gamma di applicazioni:
Rilevazione della posizione del volante
Rilevazione della posizione del pedale
Rilevazione della posizione dell'acceleratore
Rilevazione della coppia
Monitoraggio e controllo delle macchine di processo (migliaia di applicazioni)
Mantenimento dei riferimenti di posizione assoluti nelle macchine CNC
Controllo della posizione assoluta nelle macchine CNC e MRI
Feedback di posizione nella robotica di ogni tipo
Sistemi elettronici, in particolare per l'interfaccia umana
Applicazioni del nastro trasportatore
Sensori di parcheggio
Un sensore di posizione angolare misura la posizione angolare di un albero. I sensori angolari sono disponibili in una ampia varietà, dai semplici sensori induttivi che contano ogni volta che l'albero ruota, agli encoder ad alta risoluzione che forniscono centinaia o addirittura migliaia di posizioni intorno alla rotazione di 360° e riportano anche la direzione di rotazione.
Esistono diversi tipi di sensori contatore ed encoder che vengono utilizzati oggi nell'acquisizione dei dati, tra cui:
| Tipo di Sensore | Descrizione |
|---|---|
| Sensori di Prossimità | Rileva un oggetto che si trova entro una distanza predefinita dal sensore ed emette un impulso. Utilizzato per applicazioni di conteggio, tachimetro e velocità di rotazione |
| Encoder Rotativi | Sensore ad albero rotante che emette segnali A, B e Z con un massimo di migliaia di impulsi di risoluzione intorno a 360° |
| Encoder Lineari | Stessa tecnologia di un encoder rotativo, tranne per il fatto che questi encoder funzionano in modo lineare, ovvero in linea retta |
| Sensori a Ruota Dentata | Sensori con numero definito di impulsi per giro (solitamente 60), a volte con denti mancanti (60-2) per angolo o punto di partenza noto |
| Sensori Ottici | Sensore angolare ottico senza contatto che rileva un foro in un disco rotante o strisce bianche/nere su nastro apposto su un albero. |
Diamo un'occhiata a ciascuno di questi tipi di sensori e vediamo come possono essere associati ai sistemi DAQ di oggi.
Sensori di Prossimità
Un sensore di prossimità è in grado di rilevare un oggetto vicino senza entrare in contatto con esso e quindi emettere un segnale di tensione o un impulso. Esistono diversi tipi di sensori di prossimità, che vengono scelti in base alla composizione dell'oggetto o degli oggetti da rilevare. is able to detect a nearby object without making contact with it, and then output a pulse or voltage signal. There are several types of proximity sensors, which are chosen based on the composition of the object(s) that should be detected.


Ad esempio, un sensore di prossimità induttivo crea un campo elettromagnetico attorno alla sua estremità di misura. Secondo il noto effetto magnetoresistivo, la resistenza di alcuni oggetti (in particolare quelli ferrosi) cambierà quando sono esposti a campi magnetici. La maggior parte dei sensori di prossimità sfrutta questo effetto creando un piccolo campo magnetico e quindi rilevando quando questo viene interrotto o modificato in modo significativo a causa della presenza di tale materiale.
Quindi, quando posizioniamo questo tipo di sensore vicino a un albero rotante e poi appoggiamo un componente con una caratteristica ferrosa sull'albero che passerà vicino al sensore ad ogni giro, abbiamo un sensore di velocità molto affidabile e preciso. Il sensore rileva l'interruzione del campo ed emette un segnale di impulso o di tensione che qualsiasi sistema DAQ può visualizzare e registrare.


Esistono anche sensori di prossimità capacitivi in grado di rilevare oggetti non metallici, sfruttando il principio dell'accoppiamento capacitivo. Invece di un campo elettromagnetico, generano un campo elettrostatico. Quando un oggetto entra in questo campo, cambia la capacità nel circuito dell'oscillatore del sensore. Nel caso di sensori di prossimità magnetici e capacitivi, la loro sensibilità all'oggetto target può essere regolata.
Nota: ci sono anche sensori fotoelettrici che emettono luce e ne rilevano la riflessione. Per maggiori informazioni vai alla sezione Sensori ottici.
I sistemi DAQ avanzati come quelli di Dewesoft possono contare questi impulsi ed eseguire su di essi tutti i tipi di operazioni matematiche, inclusa la conversione in RPM, consentire il ripristino dei valori e altro ancora.
Applicazioni del Sensore di Prossimità
Conteggio del numero di giri al minuto (RPM) dell'albero rotante (applicazioni con tachimetro)
Conteggio delle parti che passano attraverso la linea di produzione
Rilevazione di veicoli all'incrocio
Rilevazione del livello negli impianti di imbottigliamento ed inscatolamento
Rilevazione della posizione degli oggetti sulla catena di montaggio
Vantaggi del Sensore di Prossimità
Molto affidabili perché non entrano mai in contatto con gli oggetti rilevati. L'usura è praticamente inesistente
Costo iniziale e di esercizio molto basso
I tipi capacitivi possono essere utilizzati anche per misurare lo spessore
I tipi induttivi non sono influenzati da acqua, fango, ecc.
Svantaggi del Sensore di Prossimità
Distanze di rilevamento limitate: la maggior parte dei sensori induttivi è limitata a 70 mm (2,76 pollici)
Richiedono alimentazione esterna
Input Dewesoft Applicabile
Gli ingressi contatore/encoder di Dewesoft sono adatti ai sensori di prossimità di ogni tipo e possono persino fornire energia alla maggior parte di essi, quando richiesto. Per i dettagli completi, vedere la sezione sottostante Tecnologia Dewesoft SuperCounter®.
Encoder Rotativo
Un encoder rotativo noto anche come “shaft encoder” o “encoder shaft” fornisce in genere un'eccellente risoluzione angolare, poiché sono disponibili fino a migliaia di passi per giro di 360°, il che consente passi molto più piccoli di 1°. Molti encoder possono anche rilevare il verso di rotazione, essenziale in alcune applicazioni.


Encoder Rotativi Incrementali
Gli encoder incrementali segnalano i cambiamenti relativi di posizione e direzione - non tengono traccia della posizione assoluta (angolo). Gli encoder incrementali emettono segnali A e B, che indicano i cambiamenti nel movimento e nella direzione. Alcuni di loro sono possono essere riferiti a una particolare posizione. Quando viene raggiunta questa posizione, viene generato un segnale di uscita Z aggiuntivo. Gli encoder incrementali sono la tipologia di encoder più comuni e diffusi.
Usano un encoder in quadratura per generare le loro uscite A e B. Con questo metodo, la differenza di fase tra le uscite A e B è tipicamente impostata su +90° (quando il senso di rotazione è orario) e -90° (quando il senso di rotazione è antiorario). Lo schema di fasatura basato su 90 gradi tra le uscite A e B è noto come "quadratura".


Quando l'albero non gira, le uscite dell'encoder A e B sono zero.
Quando l'albero sta girando, la frequenza di uscita dell'encoder rappresenta direttamente la velocità dell'albero con altissima fedeltà. La risoluzione dell'encoder è definita dal numero di passi in cui è divisa la rotazione di 360° dell'albero. Con gli encoder incrementali, questo può variare da poche centinaia di passi a 10.000 passi intorno a una rotazione.
Gli encoder incrementali emettono cambiamenti di movimento e direzione con una latenza molto bassa. Questo li rende ideali per applicazioni ad altissime velocità, che gli encoder assoluti non possono supportare.
Impulsi per giro, noto anche come PPR, è una caratteristica distintiva degli encoder incrementali. Questo definisce quanti impulsi per rotazione di 360° dell'albero emetterà. Maggiore è il PPR, maggiore è la risoluzione dell'encoder.
È importante che l'ingresso del contatore a cui si collega un encoder incrementale abbia una larghezza di banda sufficientemente elevata per gestire l'uscita massima possibile. Diciamo che stiamo usando un encoder 360 PPR, che emette 1 impulso per giro. Se questo encoder ruota a 600 giri/min, verrà emesso:
Non c'è nulla di cui preoccuparsi con gli ingressi contatore Dewesoft, poiché si basano su un clock interno di 102,4 MHz e possono gestire facilmente praticamente qualsiasi encoder attualmente disponibile sul mercato. Per ulteriori informazioni, vai alla sezione sottostante Tecnologia Dewesoft SuperCounter®.
Encoder Assoluti
Come suggerisce il nome stesso, gli encoder assoluti forniscono la posizione assoluta dell'albero corrente, ciò li rende ideali per misure angolari. Sono disponibili nelle versioni meccanica, ottica e magnetica.


Mentre gli encoder incrementali emettono un flusso di impulsi, gli encoder assoluti emettono valori univoci per ogni posizione intorno all'albero. Un'altra distinzione è che, mentre gli encoder incrementali emettono semplicemente i loro impulsi A, B e Z quando l'albero gira, gli encoder assoluti devono essere interrogati dal sistema di misura. Quindi emettono una parola di dati multi-bit univoca che indica la posizione esatta dell'albero. Questa parola è un valore univoco e non deve essere decodificata di per sé.
Sebbene non siano "veloci" come gli encoder lineari, gli encoder assoluti forniscono una risoluzione di posizione più elevata rispetto agli encoder incrementali. Si noti che, poiché questi sensori non hanno uscite a impulsi, non possono essere utilizzati con ingressi Dewesoft SuperCounter. Richiedono un'interfaccia digitale in grado di leggere le letture multibit. Le interfacce comuni disponibili per gli encoder assoluti includono seriale, Fieldbus ed ethernet.
Applicazioni Encoder Rotativi Incrementali
Prodotti di consumo - Posizione della trackball, controlli dei sistemi di intrattenimento
Movimentazione dei materiali - Misura della velocità di motori, nastri trasportatori, sistemi di riempimento
Produzione di PCB - misura della posizione dei sistemi pick and place
Tessili, metalli, pasta di legno e carta - misura della velocità, della posizione e della distanza della macchina
Aerospaziale - Feedback posizione attuatore e posizionamento antenna
Vantaggi Encoder Rotativo Incrementale
Alta velocità e bassa latenza
Alta risoluzione (fino a migliaia di valori discreti intorno a una rotazione di 360°)
Uscita della posizione "home" Z disponibile
Altamente affidabile e preciso
Svantaggi Encoder Rotativo Incrementale
Possibili interferenze RF ed EM con encoder magnetici
Possibili interferenze luminose con encoder ottici
Può essere disturbato da ambienti difficili
Input Dewesoft Applicabili
Gli ingressi contatore/encoder di Dewesoft sono perfettamente adatti a encoder incrementali di ogni tipo e supportano un'ampia gamma di modalità operative, tra cui X1, X2 e X4. Per i dettagli completi, vai alla sezione sottostante Tecnologia Dewesoft SuperCounter®.
Encoder Lineari
Un encoder lineare misura la posizione lungo un percorso lineare. A differenza di un encoder rotativo che ha una piastra circolare all'interno che consente di misurare la posizione dell'albero, la maggior parte degli encoder lineari si sposta lungo una scala esterna e determina la propria posizione grazie ai contrassegni sulla scala.


Un esempio perfetto è una stampante a getto d'inchiostro, che utilizza un codificatore lineare per spostare con precisione la testina di stampa avanti e indietro lungo la larghezza della carta durante la stampa. Alta risoluzione e precisione sono ovviamente richieste in questa e in innumerevoli altre applicazioni.
La tecnologia di rilevamento più diffusa utilizzata con gli encoder lineari è quella ottica, tuttavia esistono encoder che utilizzano anche le tecnologie magnetica, capacitiva e induttiva. Gli encoder ottici forniscono la massima precisione e la massima risoluzione possibile, tuttavia, è necessario prestare attenzione per evitare interferenze che blocchino la loro "visione".
Sono disponibili encoder lineari con uscita analogica e digitale. I sistemi di acqusizione dati Dewesoft sono più adatti alle uscite digitali poiché forniscono uscite A e B molto simili agli encoder rotativi incrementali, come descritto nella sezione precedente.
Applicazioni Encoder Lineari
macchine CNC
Stampanti a getto d'inchiostro
Scanner laser
Sistemi di assemblaggio pick-and-place
Robotica
Vantaggi Encoder Lineari
Molto affidabili perché non entrano mai in contatto con gli oggetti rilevati. L'usura è praticamente inesistente
Costo iniziale e di esercizio molto basso
I tipi capacitivi possono essere utilizzati anche per misurare lo spessore
I tipi induttivi non sono influenzati da acqua, fango, ecc.
Svantaggi Encoder Lineari
Distanze di rilevamento limitate: la maggior parte dei sensori induttivi è limitata a 70 mm (2,76 pollici)
Richiedono alimentazione esterna
Input Dewesoft Applicabili
Gli ingressi Counter/Encoder di Dewesoft sono perfettamente compatibili con gli encoder lineari incrementali digitali. Per i dettagli completi, vai alla sezione sottostante Tecnologia Dewesoft SuperCounter®..
Sensori a Ruota Dentata
Questo sensore di tipo angolare è costituito da una ruota dentata montata su un albero del motore, più un sensore di prossimità posizionato in modo da rilevare il passaggio dei denti dell'ingranaggio. Ciò fornisce una risoluzione maggiore rispetto a un sensore di prossimità che rileva solo una caratteristica per giro di un albero, ma non la stessa risoluzione di un encoder rotativo, che può avere in effetti migliaia di "denti" per giro.
Questo sensore di prossimità in genere è di tipo a effetto Hall, ma è possibile usarne anche di altre tipologie. I sensori a ruota dentata sono ideali per misurare la velocità di un motore. Tale sensore è analogo a un tachimetro.

Il sensore di prossimità ad effetto Hall rileva la variazione di flusso che si trova nel traferro tra un magnete e i denti di ingranaggio ferrosi passanti. Nei moderni sistemi DAQ, il segnale viene convertito in un'onda quadra binaria che è immune ai requisiti di orientamento e può seguire la velocità dell'ingranaggio fino a un punto fermo... e rilevare il primo dente dell'ingranaggio che passa immediatamente all'accensione.
Si noti che la maggior parte dei sensori ad effetto Hall sono in grado di rilevare, non solo il passaggio dei denti degli ingranaggi, ma possono anche essere utilizzati per rilevare fori in dischi e piastre, elementi ferrosi (ad es. bulloni) aggiunti a un'ampia varietà di dischi e piastre e tacche negli alberi di trasmissione e alberi a camme.
Note that most Hall Effect sensors can detect not only gear teeth passing by, but can also be used to detect holes in disks and plates, ferrous features (e.g., bolts) added to a wide variety of disks and plates and notches in drive shafts and camshafts.


Un tipico sensore a ruota dentata semplice ha 60 denti attorno alla sua circonferenza, dove ogni dente rappresenta un angolo di rotazione di 6° dell'albero di 360°. Di conseguenza, il sensore darà in uscita un'onda quadra positiva solo al passaggio di ciascun dente. Da quel conteggio e dal corrispondente treno di impulsi, con un buon sistema DAQ è possibile derivare l'RPM.
Ma non possiamo conoscere il punto morto superiore, o qualsiasi altro riferimento assoluto, perché non c'è alcun riferimento fornito da questa configurazione a ruota dentata. In altre parole, non possiamo sapere quale dei 60 denti sta rilevando il nostro sensore, quindi non c'è modo di conoscere la posizione dell'albero.
Quindi, nelle applicazioni in cui è necessario conoscere l'angolo dell'albero stesso, è necessario utilizzare una ruota dentata con denti mancanti.
Ruota Dentata con Denti Mancanti
Una pratica comune è quella di utilizzare un sensore a ruota dentata in cui mancano 2 dei 60 denti. Il divario viene utilizzato per segnalare il punto morto superiore o la posizione iniziale dell'albero. La conoscenza del punto di partenza o del punto morto superiore è essenziale in alcune applicazioni. Questi sono comunemente indicati come "sensori 60-2".


I denti “mancanti” servono come riferimento in modo che il sensore possa riconoscere l'esatta posizione angolare dell'albero motore. I due denti mancanti possono essere posizionati sull'albero con l'angolazione desiderata, ad esempio nella posizione del punto morto superiore.

Si noti che sono disponibili anche sensori a ruota dentata in quadratura che in uscita A e B segnalano uno sfasamento di 90° tra loro. Questi tipi di sensore forniscono anche il senso di rotazione nei sistemi in cui l'albero può ruotare sia in senso orario che antiorario.
Applicazioni Sensore a Ruota Dentata
Misura del numero di giri degli alberi rotanti
Analisi della combustione del motore
Studi sulle vibrazioni torsionali e rotazionali
Vantaggi Sensore a Ruota Dentata
Tipicamente molto robusto e difficile da rompere
Costo iniziale e di esercizio molto basso
Svantaggi Sensore a Ruota Dentata
In alcuni sistemi, potrebbe essere difficile installare la ruota dentata
Distanze di rilevamento limitate: la maggior parte dei sensori induttivi è limitata a 70 mm (2,76 pollici)
Risoluzione angolare limitata rispetto agli encoder, che possono fornire centinaia e persino migliaia di passaggi attorno alla rotazione dell'albero di 360°.
Input Dewesoft Applicabili
Gli ingressi contatore/encoder di Dewesoft sono adatti alle configurazioni del sensore a ruota dentata con praticamente qualsiasi numero di denti, con o senza denti mancanti, nonché configurazioni del sensore a ruota dentata con dente dell'ingranaggio in quadratura. Per i dettagli completi, vai alla sezione sottostante Tecnologia Dewesoft SuperCounter®.
Sensori Ottici
I sensori ottici sono costituiti da un disco con fori o segni bianco/nero attorno alla sua circonferenza o da un nastro montato sull'albero rotante. Un sensore ottico a infrarossi è montato in prossimità delle marcature. Emette un impulso ogni volta che attraversa un foro o un segno nero. Questi dischi sono disponibili in diverse risoluzioni. Ad esempio, un disco con 360 marcature ha risoluzione di 1°.


Esistono anche sensori a nastro ottico, questi consistono in un sensore ottico e un nastro adesivo su cui sono stampate strisce bianche e nere. Il nastro a strisce è avvolto attorno a un albero a strisce, con il sensore ottico puntato su di esso. Il sensore fa rimbalzare la luce sul nastro e può rilevare ogni striscia nera e convertirla in un impulso di uscita.
Esistono anche tachimetri ottici, che proiettano la luce visibile su una ruota o un albero rotante e utilizzano i riflessi per contare le caratteristiche sull'albero o sulla ruota per calcolare l'RPM. La maggior parte di questi sono dispositivi palmari che forniscono una lettura su uno schermo, ma non hanno un'uscita elettrica che possiamo registrare.


Che si tratti di una configurazione del sensore ottico basata su disco o su nastro, il risultato è lo stesso: otteniamo un'uscita ad impulsi che possiamo immettere nel nostro sistema DAQ. Dewesoft offre un sensore a nastro chiamato DS-TACHO-4. Ha una larghezza di banda di 100 kHz e una comoda soglia di rilevamento regolabile.


Quando avvolgi il nastro attorno a un albero, ci sarà un punto di transizione. È possibile aggiungere del nastro nero a questo punto per creare una tripla striscia nera. Il sensore ottico può usarlo come punto di riferimento per avere un angolo o una posizione nota.


Applicazioni Sensore Ottico
Conteggio RPM di un albero rotante
Misura delle prestazioni del motore
Monitoraggio della velocità del motore
Analisi della combustione
Misure di vibrazioni torsionali
Misura di vibrazioni rotazionali
Vantaggi Sensore Ottico
Molto affidabili perché non entrano mai in contatto con gli oggetti rilevati. L'usura è praticamente inesistente
Può rilevare il punto di riferimento (striscia nera doppia o tripla)
Svantaggi Sensore Ottico
Distanze di rilevamento limitate (sensori a nastro in genere 2 ~ 5 mm)
I segni bianco/neri sul nastro possono sporcarsi in alcuni ambienti, interferendo con le letture
I liquidi possono interferire con il funzionamento del sensore ottico
Alimentazione esterna richiesta
Input Dewesoft Applicabili
Gli ingressi contatore/encoder di Dewesoft sono perfettamente adatti a sensori ottici di ogni tipo. Per i dettagli completi, vai alla sezione sottostante Tecnologia Dewesoft SuperCounter®.
Contatori Digitali
Cos'è un Contatore Digitale?
Un contatore elettronico è un circuito di ingresso digitale che conta il numero di impulsi in ingresso da sensori di prossimità, encoder e dispositivi simili. Il tipo più semplice di contatore digitale traccia e conta il tempo e gli impulsi. Proprio come un cronometro, possono essere azzerati e possono contare fino a un certo valore.


I semplici contatori forniti dalla maggior parte dei produttori di solito forniscono ampie capacità se utilizzati da soli. Quando però fanno parte di un sistema di acquisizione dati che misura simultaneamente dati analogici e forse anche ingressi aggiuntivi (come dati bus CAN, dati PMC, frame video, ecc.) raramente forniscono la sincronizzazione in tempo reale su tutti questi input. È qui che entra in gioco la tecnologia SuperCounter di Dewesoft.
Tecnologia Dewesoft SuperCounter®
Dewesoft SuperCounter® è compatibile con un'ampia gamma di encoder, sensori a ruota dentata, sensori di prossimità, ecc. I sistemi Dewesoft come SIRIUS, DEWE-43A, MINITAURs, KRYPTON, ecc. possono essere configurati con uno o più ingressi SuperCounter. Di solito questi ingressi vengono forniti su un connettore LEMO, ma, su alcuni modelli, possono essere usati altri tipi di connettore.


Di solito ci sono tre ingressi, perché gli encoder lo richiedono, come descriveremo nella sezione degli encoder di seguito. Se si desidera misurare ingressi discreti (segnali di attivazione/disattivazione TTL), è possibile utilizzare questi tre ingressi come ingressi discreti indipendenti. Sono poi disponibili tensioni di alimentazione del sensore +12V e +5V, un'uscita digitale (di cui parleremo in un altro articolo) e una connessione a terra.
Gli ingressi sono di livello TTL, il che significa che il loro stato basso deve essere inferiore a 0,8 V e il loro stato alto deve essere superiore a 2 V (fino a 5 V). Diamo un'occhiata più da vicino alle specifiche elettroniche per i contatori SIRIUS:
| Input SuperCounter® | / |
|---|---|
| Timebase | 102.4MHz |
| Timebase accuracy Typical | 5 ppm, Max: 20 ppm |
| Max. Larghezza di Banda | 10MHz |
| Filtro in Ingesso | 500 ns, 1μs, 2μs, 4μs, 5μs and 7.5μs |
| Compatibilità Livello di Ingresso | TTL (Low: <0.8, High > 2V) |
| Impedenza in Ingresso | 100kΩ pull-up to +3.3V |
| Protezione ingresso | ±25Volt continui |
| Uscita Allarme | collettore aperto, max. 100mA/30Volt |
| Alimentazione Sensore | 5V/100mA;12V/50mA |
Prima di entrare nel dettaglio di tutte le modalità operative dell'ingresso digitale e del loro possibile utilizzo, dovremmo rivedere un aspetto molto importante di ciò che rende i SuperCounters così speciali - ciò ha a che fare con il modo in cui i dati del contatore vengono allineati con precisione ai dati analogici e di altro tipo .
Allineamento dei Dati del Contatore con i Dati Analogici
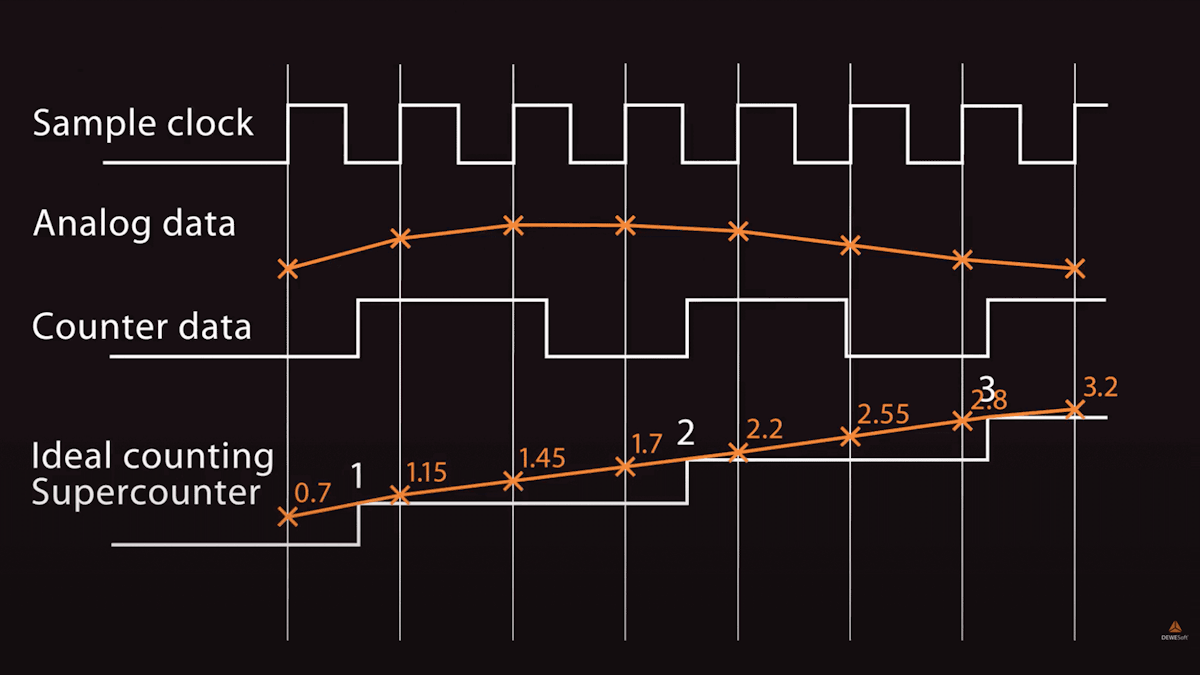
I contatori standard disponibili oggi sulla maggior parte dei sistemi DAQ forniscono solo output a risoluzione intera (ad es. 1, 1, 2, 2). Di conseguenza, le loro uscite sono sempre un campione dietro i dati del sensore analogico. Questo può essere un grosso problema in applicazioni come la vibrazione rotazionale o torsionale quando uno sfasamento anche di un solo campione può modificare i risultati.
I SuperCounters risolvono completamente questo problema estraendo valori a virgola mobile come 1.37, 1.87, 2.37 e quindi allineandoli con precisione nel tempo con il resto dei dati. In effetti, un SuperCounter è due contatori in uno. L'ingresso viene alimentato in parallelo in entrambi i contatori e il contatore secondario misura l'ora esatta del fronte di salita del segnale. Viene così calcolato il valore reale del contatore e perfettamente allineato rispetto ai valori analogici.


Il video seguente mostra come la tecnologia SuperCounter misura i segnali del contatore sincronizzati con i canali analogici. Questo video include un confronto nel mondo reale tra contatore normale e la tecnologia SuperCounting.
Anche altre fonti di dati, come CAN bus, XCP, video e altre sono sincronizzate con i dati analogici in tutti i sistemi di acquisizione dati Dewesoft.
L'altro "segreto" dietro questa tecnologia è che i SuperCounters di Dewesoft funzionano su una base dei tempi di 102,4 MHz che è indipendente e molto più alta della frequenza di campionamento analogica


L'importanza dell'Isolamento Elettrico
L'isolamento è tanto importante nel mondo digitale quanto lo è nel mondo analogico. Il rumore di fondo delle linee digitali può essere facilmente scambiato per eventi reali e quindi conteggiato male. Per questo motivo l'hardware DAQ Dewesoft fornisce un solido isolamento su tutti gli ingressi digitali e contatore.
L'Importanza del Filtraggio
Nel mondo reale, rumore e spike sulle uscite del contatore non sono rari. Il problema è che se gli spike sono sufficientemente alti in ampiezza possono essere contati come impulsi, risultando come valori errati. I SuperCounter Dewesoft forniscono filtri avanzati sui loro input che possono essere utilizzati per mitigare questo problema, proprio come si fa nel dominio analogico.
Nel grafico sottostante si può vedere che il secondo impulso rosso è in realtà un problema tecnico, ma è abbastanza grande da essere stato contato come un impulso reale (vedi il passaggio blu direttamente sotto di esso - l'uscita del contatore eventi).


Modalità Operative
Con questi ingressi digitali SuperCounter è possibile fare davvero molto. L'hardware SuperCounter è strettamente integrato con il software DAQ Dewesoft X, fornendo accesso a una vasta selezione di funzionalità:
Modalità conteggio eventi (base, gated, up/down, encoder base)
Tipologia Sensore (encoder, tacho, CDM, 60-2,...)
Modalità di temporizzazione della forma d'onda (periodo, ampiezza dell'impulso, duty cycle)
Diamo un'occhiata a queste modalità e a come si applicano ai sensori nelle sezioni precedenti di questo articolo.
Modalità Conteggio Eventi
In modalità di conteggio eventi, il software Dewesoft X fornisce diversi modi per contare gli impulsi di un flusso di impulsi in ingresso, tra cui:
Contatore base
Conteggio Gate
Contatore Up/down
Encoder base
Contatore Base
Nella modalità di conteggio eventi base, possiamo contare i fronti di discesa o di salita del segnale. È sufficiente collegare il segnale a uno degli ingressi del contatore alla massa.


Nel software, selezionare l'applicazione Conteggio eventi, quindi la modalità Conteggio eventi base. Ora fai sapere al software a quale pin di ingresso hai collegato il segnale. Puoi scegliere di fare in modo che il sistema conti UP o DOWN. C'è una casella di controllo per ripristinare o meno il conteggio all'inizio della misura.


Conteggio Gate
Nella modalità di conteggio gate conteremo un impulso solo quando un segnale gate è alto. Si collega il segnale a impulsi stesso all'ingresso IN0 (e la massa) e si collega un secondo segnale all'ingresso IN1, per fungere da segnale di gate.


Nota che ci sono caselle di controllo INV (inverso) su entrambi gli ingressi. Questo è importante per poter impostare la corretta polarità dei segnali. Ad esempio, se il segnale del gate è normalmente alto, ma è necessario che sia normalmente basso, è possibile selezionare la casella INV accanto al selettore del gate del segnale.


Conteggio Up/Down
La modalità di conteggio up/down è simile alla modalità di conteggio gate descritta sopra, tranne per il fatto che il gate viene utilizzato per controllare se contiamo verso l'alto o verso il basso. Quando il gate è alto e si verifica un impulso contiamo IN SU, e quando il gate è basso e si verifica un impulso, contiamo IN GIU'.


L'impostazione è la stessa di quella vista per il contatore gate. E come sempre, sono inclusi i controlli di filtraggio, reset all'inizio della misura e INV.

Contatore Encoder Base
Nella modalità encoder base, possiamo configurare praticamente qualsiasi encoder incrementale presente oggi sul mercato in modo molto flessibile e intuitivo.


Facendo riferimento allo screenshot, basta selezionare la modalità encoder in alto a sinistra della schermata di configurazione del contatore Dewesoft X. Come prima, dovrebbero essere selezionati gli ingressi Segnale A e Segnale B al centro dello schermo (normalmente sono collegati rispettivamente a IN0 e IN1).
Si noti che se si desidera utilizzare l'uscita Z (posizione zero) dall'encoder, è necessario selezionare la casella Encoder Zero nella parte superiore destra dello schermo. Quando lo fai, una nuova casella di menu apparirà sotto il segnale A e il segnale B in modo che tu possa selezionare la linea di ingresso utilizzata per il segnale zero:
Normalmente questa sarà la linea IN2.
Che tipo di output vorresti dall'encoder?
Nella sezione inferiore, puoi selezionare dal canale dell'angolo se desideri COUNTS, RIVOLUZIONI o GRADI. Nello screenshot qui sopra abbiamo selezionato REVS.
Se lo desideri, puoi anche inserire un fattore di scala. I valori x e b predefiniti sono 1 e 0 come mostrato sopra. È un metodo di scala lineare di base y = mx + b,
Dove:
X = il moltiplicatore di scala (può essere un valore in virgola mobile o intero; 1 = nessun moltiplicatore)
B = l'offset (può essere positivo o negativo; 0 = nessun offset)
La linea Frequenza può fornire anche Conteggi o RPM (giri al minuto).
Ora diamo un'occhiata all'angolo in alto a destra dello schermo. Dobbiamo dire al software quanti impulsi per giro vengono emessi. Nella nostra schermata di esempio, è un encoder 360, quindi emette un impulso per 1° intorno ad una rotazione. Si deve inserire la risoluzione corretta per il tuo codificatore (di solito è etichettata direttamente sul sensore).
Successivamente, puoi impostare la modalità dell'encoder. Ecco cosa significano X1, X2 e X4:
Modalità X1 - In questa modalità predefinita, verranno conteggiati i fronti di salita dalla sorgente A.
Modalità X2 - In questa modalità, il contatore conterà i fronti di salita e di discesa della sorgente A, quindi la risoluzione verrà aumentata di un fattore 2. Tutto il resto rimane lo stesso.
Modalità X4 - In questa modalità, il contatore conterà i fronti di salita e di discesa della sorgente A e verrà conteggiata la sorgente B, quindi la risoluzione verrà aumentata di un fattore 4. Tutto il resto rimane lo stesso.
Lo scopo delle modalità X2 e X4 è ottenere una maggiore risoluzione dall'encoder, ma bisogna fare attenzione perché, a meno che il duty cycle non sia esattamente del 50%, o in modalità X4 se le tracce A e B non sono allineate con precisione, potranno essere introdotti errori di misura a causa del "jitter" meccanico.
Va detto che ci sono encoder con una risoluzione molto superiore a 360 impulsi per giro, quindi gli ingegneri possono abbinare il sensore ai requisiti di misura in modo flessibile.
Modalità Sensore
In modalità sensore, si configura il contatore per sensori specifici, tra cui:
Encoders
Tachimetri
Sensori CDM
Sensori 60-2
E altro
Naturalmente, è possibile settare tutte queste impostazioni manualmente utilizzando i metodi mostrati nelle sezioni precedenti, ma il software Dewesoft X include un database di sensori in cui è possibile creare, modificare e riutilizzare i sensori specifici, rendendo l'installazione facile e veloce. Perché ricominciare da zero quando utilizzi lo stesso encoder o sensore di prossimità che usavi qualche giorno fa? Con pochi semplici passaggi, puoi aggiungere qualsiasi sensore al tuo database, quindi selezionarlo semplicemente per nome la prossima volta che lo utilizzerai e verrà impostato nel software il più velocemente possibile.
Modalità di Temporizzazione della Forma d'Onda
In modalità di temporizzazione della forma d'onda, il software DAQ Dewesoft X può fornire diverse utili uscite calcolate da qualsiasi flusso di impulsi in ingresso, tra cui:
Periodo
Pulsewidth
Duty-Cycle


Modalità Ingresso Digitale Discreto
Ogni contatore ha tre ingressi, quindi puoi utilizzarli liberamente come ingressi digitali discreti (invece che come contatori). In questo caso, non si utilizza il modulo contatore ma si configurano uno o più ingressi digitali all'interno del software di acquisizione dati Dewesoft X.
Ed è davvero semplice come attivare uno o più dei tuoi ingressi digitali nella schermata di configurazione del software.


Non esiste praticamente alcuna configurazione perché gli ingressi sono 0 o 1 e non sono possibili altri valori. È possibile impostare il nome del canale, il colore e le unità ingegneristiche (EU), come mostrato nello screenshot seguente:
Quindi, sui display dell'interfaccia di misura, applica semplicemente questi ingressi digitali a qualsiasi widget. Questi canali verranno memorizzati insieme agli altri dati. È così semplice.
Per andare oltre, puoi utilizzare questi valori discreti nei canali delle formule matematiche o come input per uno o più canali trigger che potranno essere usati per avviare la registrazione.
Sistemi DAQ Dewesoft con Ingressi Digitali
Sistemi DAQ SIRIUS
La maggior parte delle slice DAQ SIRIUS ha ingressi SuperCounter opzionali. Ogni fetta SIRIUS è composta da 8 canali di ingresso analogico, ed è possibile configurarla con un massimo di 8 contatori per fetta (dipende da quali connettori di ingresso analogico vengono utilizzati).


SIRIUS Standard Input Modules
| Modulo | STG | STGM | ACC | CHG | HV | LV |
|---|---|---|---|---|---|---|
| Versione Counter | √ | √ | √ | √ | X | √ |
Moduli di ingresso SIRIUS HS (alta velocità)
| Modulo | STG | ACC | CHG | HV | LV |
|---|---|---|---|---|---|
| Versione Counter | √ | √ | √ | X | √ |
Nota: le sezioni SIRIUS-HD non possono avere input SuperCounter a causa di vincoli di spazio.
Per applicazioni con ingressi discreti ad alta quantità, il modulo SIRIUS STGM-DB dispone di un connettore maschio DSUB-37 aggiuntivo che fornisce 24 ingressi digitali dedicati. Questi 24 ingressi possono essere utilizzati in alternativa per 8 sensori contatore/encoder.
Sistema DAQ DEWE-43A
Il DEWE-43A è un sistema DAQ portatile a 8 canali che fornisce otto SuperCounters come standard. Ciascun contatore è indipendente e può essere utilizzato in alternativa come tre ingressi discreti anziché come contatore. Ogni sistema DEWE-43A include il pluripremiato software Dewesoft X per l'impostazione, il funzionamento, la visualizzazione, l'archiviazione, l'analisi e la generazione di report completi del sistema.


Sistemi DAQ KRYPTON
KRYPTON e KRYPTON ONE sono moduli DAQ estremamente robusti, classificati IP67 per funzionare in ambienti difficili e/o sottoposti a urti, vibrazioni e temperature estreme. Ogni sistema DAQ KRYPTON include il pluripremiato software Dewesoft X per la configurazione completa del sistema, il funzionamento, la visualizzazione, l'archiviazione, l'analisi e la generazione di report.


Moduli digitali robusti KRYPTON e KRYPTON-1
| Modulo | Ingressi Counter | Ingressi Discreti | Uscite Discrete | Velocità dati in ingresso | Velocità dati in uscita |
|---|---|---|---|---|---|
| KRYPTON 4xDI | - | 4 | - | 40 kS/s/ch | N/A |
| KRYPTON-4xDO | - | - | 4 | N/A | See Note |
| KRYPTON-1xCNT | 1 | - | - | 10 MHz | 20 kS/s/ch |
| KRYPTONi-16xDI | - | 16 | - | 20 kS/s/ch | N/A |
| KRYPTONi-8xDI-8xDO | - | 8 | 8 | 20 kS/s/ch | See Note |
| KRYPTONi-16xDO | - | - | 16 | 20 kS/s/ch | See Note |
Nota: le velocità di uscita dipendono dal master EtherCAT selezionato.
Sistemi DAQ IOLITE
I sistemi IOLITE DAQ Dewesoft offrono un modulo di ingresso digitale a 32 canali. Questo modello 32xDI con facile collegamento tramite terminale a vite e alimentazione del sensore è ideale per applicazioni di controllo e acquisizione dati ad alto numero di canali.


IOLITE combina una potente acquisizione dati con il controllo in tempo reale tramite due interfacce EtherCAT. E' disponibile in un modello rack da 19 pollici e in un modello da banco. Sono disponibili moduli di ingresso e uscita digitali per IOLITE, come mostrato nella tabella seguente. Ogni sistema IOLITE include il pluripremiato software Dewesoft X per la configurazione completa del sistema, il funzionamento, la visualizzazione, l'archiviazione, l'analisi e la generazione di report.
Moduli I/O digitali IOLITE
| Modulo | Ingressi discreti | Uscite discrete | Velocità dati in ingresso | Velocità dati in uscita |
|---|---|---|---|---|
| IOLITE-32-DI | 32 | - | 40 kS/s/ch | N/A |
| IOLITE-32-DO | - | 32 | N/A | Leggi la Nota |
Nota: la velocità di uscita dell'uscita digitale dipende dal master EtherCAT.