




Identifiering av de fysikaliska parametrarna hos bultförband

Carsten Frederiksen & Matteo Di Manno (Sapienza University of Rome) in cooperation with Annalisa Fregolent and students of the University of L'Aquila, Jacopo Brunetti, and Walter D'Ambrogio.
June 5, 2023
För mekaniska strukturer som består av flera komponenter som är sammanfogade med förband är studiet av förbandet av grundläggande betydelse. Att identifiera förbandets parametrar gör det möjligt att studera förbandens påverkan på det sammansatta systemets dynamiska beteende. En identifieringsteknik involverar så kallad frikoppling. Denna teknik kräver mätning av frekvensresponsfunktionerna för systemets sammansättning och dess komponenter.
En grupp studenter vid två italienska universitet, Sapienza-universitetet i Rom och universitetet i L’Aquila, började experimentera med frikopplingstekniken. De anslöt sig till forskargrupper inom mekaniska vibrationer och vibroakustik.
De flesta mekaniska strukturer består av flera komponenter som är sammanfogade med förband, såsom bultförband eller spikförband, etc. Även om förbanden endast finns i en liten del av strukturen kan de avsevärt påverka det sammansatta systemets dynamiska beteende.
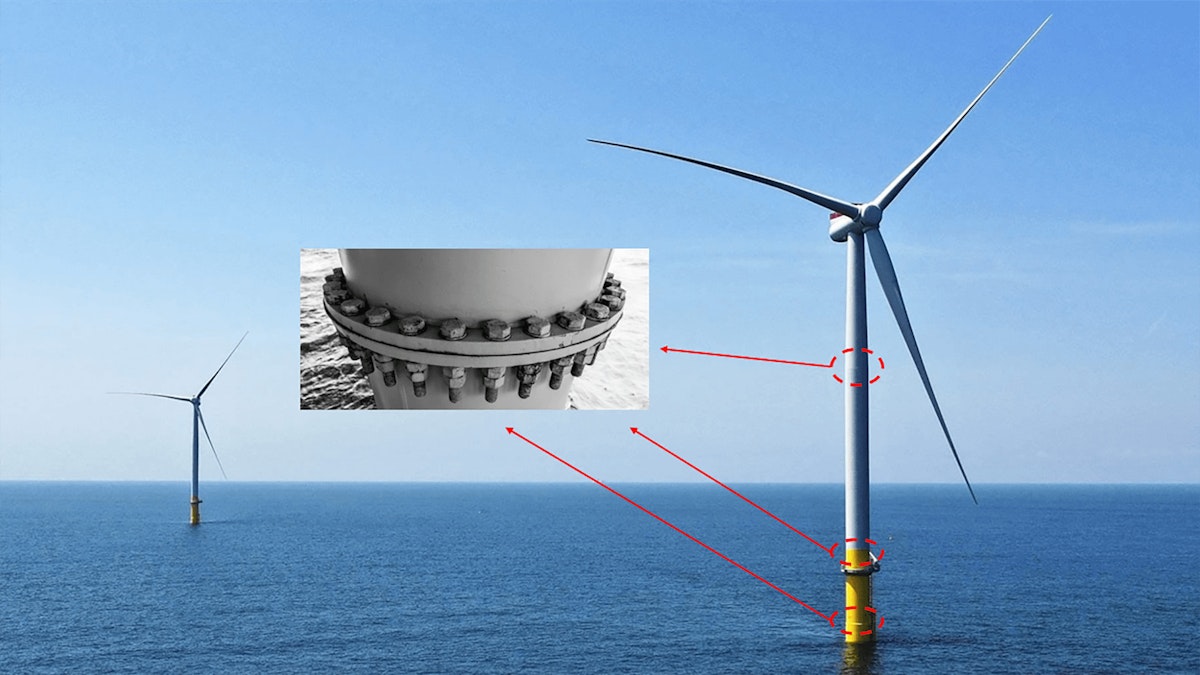
Ett tydligt exempel är bultförband, som kan förändra strukturens totala styvhet i området där komponenterna möts. Som en följd uppstår en variation i det sammansatta systemets egenfrekvenser beroende på driftförhållandena. Detta observeras till exempel i vindkraftstorn.
Att studera effekten av mekaniska förband på det sammansatta systemets dynamiska beteende är därför av grundläggande betydelse. Med utgångspunkt i analysen av ett förenklat system som det i Figur 1.


Inom strukturdynamik kan sådana studier genomföras genom att modellera förbandet med mass-, styvhets- och dämpningsparametrar som kopplar samman delsystem och komponenter. Eftersom dessa parametrar inte är kända i förväg måste de identifieras genom en procedur som kallas förbandsidentifiering.
Förbandsidentifiering genom frikoppling
En av de mest använda metoderna för att identifiera förband är dynamisk substrukturering, i synnerhet proceduren som kallas frikoppling. Vid substrukturering delas en sammansatt struktur upp i flera sammankopplade komponentdelsystem.
Betrakta till exempel en sammansatt struktur där ett bultförband kopplar samman två komponenter, se Figur 2. Denna sammanfogade struktur kan delas upp i tre delsystem, de två komponentdelsystemen A och B samt ett tredje delsystem som representerar bultförbandet J. Frikopplingen gör det möjligt att identifiera det dynamiska beteendet hos förbandsdelsystemet J genom att ta bort dynamiken hos delsystemen A och B från dynamiken hos det sammansatta systemet AJB, där A och B mäts individuellt.


För att identifiera förbandet genom frikoppling måste frekvensresponsfunktionerna (FRF) för den sammansatta strukturen och de enskilda komponentdelsystemen mätas. FRF definieras som förhållandet mellan respons och excitation som en funktion av excitationsfrekvensen.
Experimentell tillämpning
I vårt experiment använde vi frikoppling för att identifiera bultförbandet i ett referensfall som i litteraturen är känt som en Brake Reuss Beam, två stålbalkar som är sammanfogade vid mitten med tre bultar.


Frekvensresponsfunktionerna för det sammansatta systemet och de enskilda balkarna registrerades med hjälp av DewesoftX-programvarans tillägg för modaltestning.
Detta tillägg innehåller de huvudsakliga verktygen för att registrera FRF:er, med möjlighet att visa FRF:erna och koherensen i realtid för att utvärdera kvaliteten under mätningen. Dessutom kan tillägget extrahera information om den testade strukturen, såsom egenfrekvenser, dämpning och modala deformationer.


Genom 42 excitationspunkter och 42 mätpunkter bestämde vi frekvensresponsfunktionerna för det sammansatta systemet. Vi använde en SIMO-testprocedur (Single Input-Multi Output) där strukturen exciterades med en modalhammare (PCB 086C03), och vi mätte accelerationen vid sju olika punkter med enaxliga accelerometrar (PCB 352A24).
Kraften och accelerationen registrerades med hjälp av ett Dewesoft SIRIUSi-datainsamlingssystem med åtta analoga kanaler, baserat på DualCoreADC®-teknologi med en dubbel 24-bitars analog-till-digital-omvandlare.
Ett anti-aliasingfilter på varje analog kanal gjorde det möjligt att uppnå ett dynamiskt område på 160 dB i tid och frekvens med en samplingsfrekvens på 200 kHz. I detta fall använde vi en samplingsfrekvens på 5000 Hz för att mäta FRF i området 0–1400 Hz.
Vi använde roving hammer-tekniken som finns i tillägget för modaltestning för att mäta alla frekvensresponsfunktioner. När positionerna för de sju accelerometrarna hade fastställts exciterade vi strukturen i alla 42 excitationspunkter. Denna procedur upprepades genom att flytta accelerometrarnas positioner utan att avbryta mätningen.
Tillägget för modaltestning gjorde det också möjligt att analysera de utförda mätningarna i efterbearbetningsfasen. Figur 5 visar några av de uppmätta FRF:erna för det sammansatta systemet.


När vi även hade mätt FRF för de enskilda balkkomponenterna var det möjligt att identifiera förbandets mass- och styvhetsparametrar genom att tillämpa frikopplingsproceduren. Till exempel fann vi ett totalt styvhetsvärde på 9,4e9 N/m och ett värde på 3,1e10 N/m för kontaktstyvheten vid den centrala bulten.
Slutsatser
I frikopplingsapplikationen gjorde DewesoftX tillägget för modaltestning det möjligt för oss att registrera ett stort antal frekvensresponsfunktioner på kort tid. Vi kunde göra detta tack vare mjukvarans enkla gränssnitt och möjligheterna att använda roving hammer-tekniken samt visningen av FRF i realtid. Programvarans och tilläggets konsekvens gjorde det också möjligt för oss att omedelbart verifiera mätningarnas giltighet.