




Brusgolvsanalys: kvalitet på signalmätningskedjan inom byggteknik

Gabriele Ribichini & Emanuele Burgognoni
June 1, 2022
Att mäta miljöpåverkan på konstruktioner kan vara komplicerat. Mätkedjan måste vara väl sammansatt och noggrant dimensionerad för att optimera signal-brusförhållandet. Samtidigt påverkar den teknologiska utvecklingen alla testapplikationer. Högpresterande mätutrustning och kraftfull analysprogramvara till överkomliga priser har också i hög grad förändrat arbetssättet inom byggteknik.
Introduktion
Modalanalys är en typ av dynamisk undersökning som kräver en mycket hög nivå av hantering av den analoga signalen. Till skillnad från dynamisk övervakning, vars syfte är att fastställa de maximala vibrationerna som upplevs av konstruktionen, kräver operativ modalanalys, OMA, en noggrann analys av signaler med liten amplitud, vanligtvis genererade av omgivningsbrus och inte av pålagda krafter, som i fallet med ett modaltest.
Att mäta små signaler är ofta svårt. Utan en noggrann dimensionering av de olika komponenterna i mätkedjan för att optimera signal-brusförhållandet, SNR, är det mycket lätt att hamna i en situation där vibrationssignaler från omgivningsbrus har amplituder som är jämförbara med eller till och med lägre än instrumentets elektriska brus.
Bland de olika givare som används är accelerometrar mycket vanliga, enheter som omvandlar acceleration till en elektrisk signal som kan mätas med datainsamlingssystem.
Signalerna som genereras av accelerometrar kräver flera steg av förstärkning och filtrering. Vissa typer av sensorer är utformade för att ha en redan förstärkt utgång tack vare integrerad elektronik, medan andra endast levererar signalen direkt från det känsliga elementet och därför kräver särskild kablage och elektronik för signalbehandling. Alla dessa detaljer måste noggrant beaktas vid konfigurering av ett mätsystem, med hänsyn till att datainsamlingshårdvaran är en del av signalbehandlingskedjan.
En signal som inte är korrekt konditionerad eller digitaliserad leder oundvikligen till resultat som inte överensstämmer med den analyserade konstruktionens verkliga tillstånd. Inom detta teknikområde är det därför viktigt att arbeta med instrument som kännetecknas av låg brusnivå, högt signal-brusförhållande och hög dynamik, för att kunna uppfatta mycket små amplituder och minimera störningar i signalbehandlingskedjan. Det bör betonas att vi inte kan mäta signaler i detalj vars genomsnittliga amplitud ligger under bakgrundsbruset, brusgolvet, vilket innebär att valet av hårdvara måste göras med stor noggrannhet utifrån dessa parametrar.

, an analog signal conditioning circuitry, an A/D converter (analog-to-digital converter or ADC), and a data processing system (processing, storage, and display).")
Dynamiska analyser inom byggteknik utgör i sin natur en utmärkt testmiljö för datainsamlingssystem, eftersom de kräver mycket god signalbehandling och hög grad av synkronisering mellan de uppmätta kanalerna. Bristfällig signalbehandling leder ofta till att elektriskt brus överlagras på den användbara signalen. Detta försvårar efterbearbetningen, eller i värsta fall gör det omöjligt att få fram resultat från den slutliga modellen.
Detta scenario är mycket vanligt inom byggområdet. Även om brus är en avgörande faktor i analysfasen är det dock inte lika kritiskt som bristande synkronisering mellan de system som används. Den dynamiska karakteriseringen av en konstruktion syftar indirekt till att hjälpa ingenjören att avgöra om förstärkningsåtgärder behövs eller om det räcker att dokumentera konstruktionens tillstånd. Om åtgärder baseras på felaktiga modeller, som i sin tur bygger på osynkroniserad data, finns en risk att konstruktionens integritet äventyras.
I värsta fall påverkas inte bara konstruktionens stabilitet utan även säkerheten för de personer som vistas där. Därför föredras kabelbaserade system, där synkronisering kan garanteras på mikrosekundnivå. Trådlösa system når normalt inte bättre än några millisekunder i synkronisering och kräver dessutom batterier som har begränsad livslängd vid kontinuerlig datainsamling och streaming av dynamiska signaler.
För att möta dessa behov har Dewesoft utvecklat IOLITE 3xMEMS-ACC, dynamiska datainsamlingsmoduler som kombinerar sensor och elektronik i en enda enhet. Dessa system är skalbara och erbjuder mycket hög synkronisering, ner till mikrosekundnivå. De är kabelbaserade och utformade för att optimera installationen vid övervakning av stora konstruktioner, där en enda kabel används för strömförsörjning, dataöverföring och synkronisering.
Genom att koppla ihop modulerna i serie minimeras antalet kablar. Dessutom gör användningen av UTP CAT6-kablar med RJ45-kontakter det möjligt att skapa en kostnadseffektiv installation med lättillgängliga standardkomponenter från vanliga leverantörer av elektriskt material.


En ytterligare faktor av stor betydelse är samplingsfrekvensen. Även om byggteknik vanligtvis kräver analys inom låga frekvensband är det mycket fördelaktigt att arbeta med översampling för att återge den analoga signalen korrekt i tidsdomänen. Med denna teknik kan man få en renare spektral bild inom det analyserade området och minska problem kopplade till kvantiseringsbrus.
Att uppfylla Nyquist-Shannon-kriteriet vid sampling är inte tillräckligt för att säkerställa god signalkvalitet, det förhindrar endast aliasing genom användning av anti-aliasingfilter. System som enbart uppfyller detta krav tenderar att påverkas av höga nivåer av kvantiseringsbrus, särskilt vid högre frekvenser nära bandgränsen. Kvantiseringsbrus är en av de största störningskällorna i denna del av omvandlingsprocessen och leder till ett lägre signal-brusförhållande inom det observerade frekvensområdet.
För att förbättra signalens upplösning måste valet av hårdvara göras noggrant utifrån tre faktorer, typen av integrerad A/D-omvandlare, tillgänglig samplingsfrekvens och tillgängliga filter för signalrening. Inom detta område, där kvalitet prioriteras framför hastighet, är det viktigt att använda högpresterande omvandlare.
Sigma-delta-teknik är ofta det mest lämpliga valet jämfört med den snabbare men mindre noggranna SAR-tekniken, eftersom samplingsprocessen bygger på översampling, ofta upp till hundra gånger högre än den inställda samplingsfrekvensen. Sådana överväganden kan vara avgörande vid val av enskilda komponenter i mätsystemet, särskilt vid dynamiska analyser.
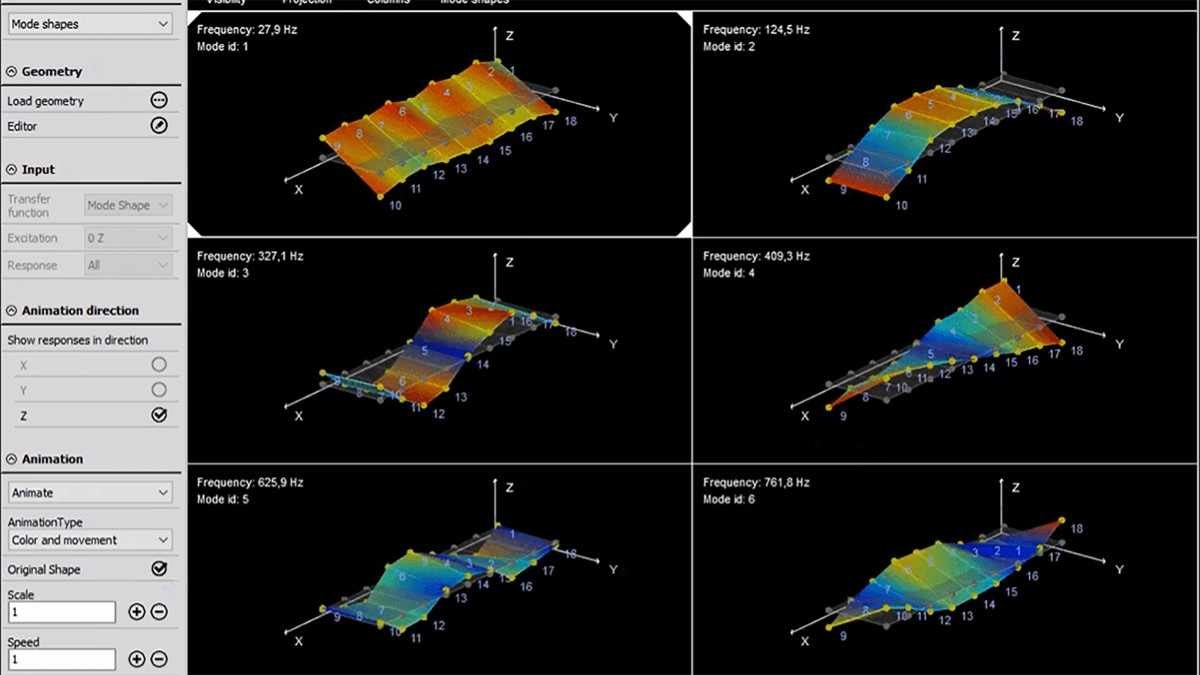
Inom strukturdynamik har modaltester som huvudsakligt mål att identifiera tre parametrar som tillsammans beskriver konstruktionens respons på vibrationer, resonansfrekvens, dämpningskoefficienter och modformer.
För att genomföra denna analys används två metoder, EMA, Experimental Modal Analysis, och OMA, Operational Modal Analysis, som väljs beroende på mätförhållandena.
Båda metoderna syftar till att excitera det frekvensband där konstruktionen uppvisar resonans, även kallade egenfrekvenser, och därefter fastställa de exakta frekvenser där resonanseffekterna uppträder. I EMA-metoden används artificiell excitation, till exempel shakers för konstruktioner, fallvikter för golv samt instrumenterade hammare för kedjor, stag och golv.

Om det inte är möjligt att applicera en sådan excitation, på grund av brist på utrustning eller konstruktionens känsliga tillstånd, kan man istället använda OMA-metoden. Med denna metod är det möjligt att identifiera egenfrekvenser baserat på omgivningsbrus. Denna analys är mer komplex än EMA, eftersom excitationsförhållandena inte är kända, endast responsen mäts.
Det är också viktigt att klargöra skillnaden mellan identifiering av modformer och en enklare ODS-analys.


Operational Deflection Shapes i tidsdomänen, mer exakt tidsdomän-ODS, visar grafiskt strukturens rörelser baserat på synkroniserade mätdata. De ger dock ingen information om förekomsten av närliggande modformer eller hur stor massa som deltar vid respektive frekvens. För att identifiera verkliga modformer krävs en valideringsprocess med mer avancerade algoritmer som inte ingår i en enkel ODS-analys.
Vid vibrationsmätningar för OMA krävs särskild noggrannhet, eftersom instrumentbruset ofta kan vara betydligt större än de accelerationsnivåer som ska mätas. Därför är kvaliteten på hårdvaran för analog-till-digital-omvandling avgörande, liksom hur den påverkar hela mätkedjan.
Bakgrundsbrus och dynamikomfång
Den spektrala brustätheten beskriver hur brusets effekt är fördelad över frekvensbandet och anges i µg/√Hz. En accelerometer som PCB 393B12, vanlig inom byggteknik, har cirka 1,30 µg/√Hz vid 1 Hz, med lägre värden vid högre frekvenser.
Genom att integrera brustätheten över ett frekvensband fås RMS-bruset, det vill säga bakgrundsbruset som kan förväxlas med verkliga vibrationer. För denna sensor ligger bakgrundsbruset runt 10 µg i området 0 till 10 Hz.
Brusnivån varierar med frekvensbandet, vilket gör korrekt analog filtrering viktig för att eliminera signaler utan relevant informationsinnehåll. Dewesoft-system erbjuder ett brett urval av lågpassfilter för att optimera signalen beroende på applikation.
En annan central parameter är det totala dynamikomfånget, som anger förhållandet mellan maxsignal och bakgrundsbrus i dB. Seismiska accelerometrar har ofta dynamik över 100 dB. För att inte begränsa sensorns prestanda krävs datainsamlingssystem med ännu högre dynamik.
Dewesofts system använder DualCoreADC-teknik med två 24-bitars omvandlare, vilket möjliggör dynamik upp till 160 dB. Detta är avgörande för att korrekt kunna mäta mycket små signaler.
Analys av bruskällor
Hela signalbehandlingskedjan påverkas av brus. I ett typiskt system med piezoelektriska sensorer, DAQ och dator finns flera kritiska punkter:
Vid gränssnittet mellan sensor och DAQ är signalen mycket svag och känslig för störningar. Därför krävs hög ingångsimpedans och välskärmade kablar med rätt mekaniska egenskaper.
I DAQ-steget introduceras olika typer av elektroniskt brus, såsom termiskt brus, skottbrus och flickerbrus. Dessa bidrar till att förvränga signalen genom att lägga till oönskade frekvenskomponenter.
A/D-omvandlingen tillför ytterligare brus genom kvantisering:
Kvantiseringsfel uppstår när signalen representeras med ett begränsat antal sampel, vilket skapar harmoniska förvrängningar
Kvantiseringsdistorsion uppstår när signalens amplitud avrundas till diskreta nivåer
Eftersom en analog signal aldrig kan återskapas perfekt från en digital representation kommer kvantiseringsbrus alltid att finnas. För att minska dess påverkan används två huvudsakliga metoder, översampling och algoritmer för brusreducering.
Dewesofts system kombinerar båda metoderna för att säkerställa att den digitala signalen ligger så nära den ursprungliga analoga signalen som möjligt.




Den triangulära vågformen är ett bra exempel på de harmoniska komponenter som uppstår när en signal segmenteras vid rekonstruktion. Dessa harmoniska bidrar i hög grad till det så kallade kvantiseringsfelet. Brusgolvet består därmed av summan av alla dessa bidrag som påverkar systemet genom hela mätkedjan.
Den viktigaste parametern för att beskriva brusnivån i en signal är dess RMS-värde. RMS definieras som signalens energiinnehåll inom ett visst frekvensband och bestäms genom att integrera effektspektral densitet över det observerade frekvensområdet.
Det observerbara frekvensbandet bestäms vanligtvis av Nyquistfrekvensen, som är hälften av samplingsfrekvensen. Dewesoft använder dock olika algoritmer baserade på översampling, vilket innebär att det effektiva frekvensbandet i deras moduler kan variera mellan en fjärdedel och en tredjedel av samplingsfrekvensen.


Ju mer integrationsintervallet minskas, desto tydligare framträder bruset inom ett specifikt frekvensdelband. Inom byggteknik krävs ofta en spektral upplösning på 0,1 Hz, eftersom den användbara signalen är koncentrerad till låga frekvenser.
Ur ett beräkningsperspektiv kräver beräkningen av RMS-värden för hela spektrumet en tid som motsvarar inversen av frekvensupplösningen. För hög upplösning leder därför till långsammare uppdatering av spektrumet. Vid en upplösning på 0,1 Hz krävs exempelvis 10 sekunder för varje beräkning.


Instrumentering på marknaden utvärderas utifrån flera parametrar kopplade till brus. Bland dessa återfinns dynamikomfång, brusgolv och signal-brusförhållande, SNR.
Dynamikomfånget beskriver förhållandet mellan den största och minsta signal som kan mätas utan distorsion. I logaritmisk skala uttrycks detta i dB och anger intervallet mellan maximal och minimal uppfattbar energi. Denna parameter är särskilt viktig inom byggteknik, där signalerna kan variera kraftigt beroende på belastning.
Ett exempel är en bro under dynamisk analys. Förskjutningarna är mycket små och accelerationerna ligger nära brusgolvet. När ett fordon passerar nära sensorerna kan accelerationen snabbt öka från omkring 10⁻⁵ g till 10⁻¹ g. Skillnaden mellan dessa nivåer är en faktor på 10 000. Utan tillräckligt dynamikomfång skulle viktig information gå förlorad på grund av signalförvrängning.
Brusgolvet, ibland kallat restbrus, representerar summan av alla signalbidrag som inte tillhör den användbara signalen.
Signal-brusförhållandet, SNR, uttrycks i dB och beskriver förhållandet mellan nyttosignal och brus vid en given samplingsfrekvens. Det är nära kopplat till brusgolvet och är en viktig indikator på systemets prestanda.
Dewesofts system använder DualCoreADC-teknik som är optimerad för signaler med hög dynamik, där högt SNR och lågt brusgolv är avgörande. Tekniken kombinerar två 24-bitars delta-sigma-omvandlare med översampling och filtrering för att minska kvantiseringsfel. Resultatet är system med mycket högt dynamikomfång.
Jämförelse av olika ADC-tekniker
Valet av rätt teknik beror på applikationen. För att utvärdera prestanda genomfördes laboratorietester där brusnivåer från olika Dewesoft-moduler med varierande arkitektur jämfördes. Dessa tester bekräftade skillnader mellan teoretiska specifikationer och verklig signalbehandling i praktiska tillämpningar.










Även om många datainsamlingssystem använder en arkitektur baserad på delta-sigma-omvandlare, har inte alla moduler samma signal-brusförhållande. Detta beror på att ingångsstegen optimeras utifrån den sensortyp som modulen är avsedd att arbeta med. Filter och översampling är tillsammans med sensorn avgörande faktorer för mätkvaliteten.
Det är tydligt att en MEMS-sensor generellt inte kan nå samma noggrannhet som en piezoelektrisk sensor. Samtidigt finns det applikationer där fördelarna med MEMS-teknik väger tyngre. Den tekniska utvecklingen har dessutom fört MEMS-sensorer nära brusnivåer under 1 µg/√Hz, vilket gör dem allt mer konkurrenskraftiga.
Enligt databladen är modellen SIRIUS HS 8xLV den svagaste när det gäller signal-brusförhållande. Orsaken ligger i dess 16-bitars SAR-arkitektur och avsaknaden av översampling, vilket annars bidrar till att minska kvantiseringsfel och relaterat brus. Utan dessa tekniker ligger brusgolvet under 10 kHz runt 100 dB.
SIRIUS 8xACC däremot innehåller de optimeringssteg som saknas i HS-modellen och erbjuder därmed bättre signalbehandling.
Om man ser till själva omvandlararkitekturen visar teorin att SAR-teknik är mindre lämplig för denna typ av tillämpning, främst på grund av begränsad precision. Trots detta används den ofta tack vare sin låga kostnad och höga hastighet. Modern utveckling har dock lett till SAR-omvandlare med upp till 24-bitars upplösning, som kombinerar snabbhet och förbättrad prestanda. Deras enkla arkitektur gör dem mycket snabba och väl lämpade för olika typer av signaler, både naturliga och artificiella.
Delta-sigma-omvandlare är däremot optimerade för hög precision och detaljrikedom. Genom omfattande översampling och avancerad digital filtrering minimeras kvantiseringsfel och distorsion. Den digitaliserade signalen genomgår ytterligare filtrering via lågpassfilter i DSP, vilket resulterar i en mycket ren och noggrant återgiven signal.




En annan viktig faktor bakom delta-sigma-tekniken är det höga dynamikomfånget, vilket gör det möjligt att digitalisera signaler med stora variationer mellan min- och maxvärden.
DualCoreADC-tekniken som utvecklats av Dewesoft förstärker denna dynamik genom att kombinera två A/D-omvandlare med olika förstärkningsnivåer. Funktionen innebär att svaga insignaler behandlas av omvandlaren med hög förstärkning, medan starkare signaler dirigeras till en omvandlare med lägre förstärkning för att undvika klippning och överstyrning.
Tack vare denna lösning kan man uppnå ett dynamikomfång på upp till 160 dB och ett signal-brusförhållande på cirka 125 dB, vilket möjliggör mycket noggrann mätning även vid stora variationer i signalnivå.


Dewesofts instrument som använder DualCoreADC-tekniken tillhör serien “SIRIUS High Dynamic” och utgör kärnan i de tester som genomfördes i denna analys för att jämföra prestanda mellan olika hårdvaror.
För att tydligt visa effekten av kvantiseringsbrus på brusgolvet genomfördes mätningar med både SIRIUS High-Speed-modeller, som använder 16-bitars SAR-omvandlare, och SIRIUS High Dynamic-modeller med 24-bitars DualCoreADC baserade på delta-sigma-teknik.




Resultaten från testerna visas i figur 19–23, där RMS-värdet för bruset har beräknats inom ett frekvensband mellan 0,2 Hz och 100 Hz.










Som förväntat uppnås de lägsta brusgolvsvärdena med SIRIUS 8xACC, vilket gör det möjligt att utföra accelerometriska analyser även i mycket styva konstruktioner. Dynamiska analyser kan fortfarande genomföras med andra moduler, men i praktiken uppstår problem om den analyserade strukturen är mycket styv, eftersom mikroskopiska accelerationer då riskerar att döljas av bruset.
Jämförelse av olika givare
För att tydligt visa skillnaderna mellan sensortyper genomfördes tester med två av de mest precisa givarna inom strukturdynamik, IEPE-accelerometrar och servomekaniska givare, även kallade Force Balance Accelerometers, FBA.
Båda typerna ger en utsignal proportionell mot acceleration, men deras funktion skiljer sig. Den piezoelektriska sensorn kan inte mäta statiska accelerationer, medan den servomekaniska kan.
Förklaringen ligger i det piezoelektriska kristallens kapacitiva beteende. När kristallen utsätts för en kraft uppstår en spänningsskillnad genom laddningsförskjutning. Dessa laddningar försvinner dock över tid, styrt av systemets resistans och kapacitans. Vid konstant belastning, som gravitation, försvinner signalen snabbt, vilket gör att mycket låga frekvenser inte kan mätas med IEPE-sensorer.
Force Balance-givare fungerar annorlunda. De innehåller en seismisk massa som hålls i jämvikt med hjälp av elektromagnetiska krafter. När acceleration påverkar massan justeras strömmen i en spole för att bibehålla jämvikten. Denna ström är proportionell mot accelerationen och kan även registrera statiska eller mycket lågfrekventa krafter.
Slutsatser
För applikationer med stora och styva konstruktioner är Dewesoft SIRIUS-system med BNC-kanaler för IEPE-accelerometrar det mest lämpliga valet. Kopplingsfiltren kan ställas ner till 0,1 Hz, vilket möjliggör mätning av vibrationsmoder från cirka 0,5 Hz med god noggrannhet.
Mätning vid så låga frekvenser är avgörande inom byggteknik, även om många system på marknaden är optimerade för högre frekvenser. Ett högpassfilter på 0,5 Hz kan exempelvis orsaka betydande fasförskjutningar upp till 5 Hz, vilket påverkar signalens kvalitet inom det mest relevanta frekvensområdet.
För hög känslighet är PCB 393B12 ett mycket lämpligt val, med en känslighet på 10 V/g som gör det möjligt att registrera mycket små vibrationer utan att de försvinner i bakgrundsbruset. PCB 393A03 erbjuder lägre känslighet, 1 V/g, och är därför mindre lämplig vid mycket styva strukturer.
Force Balance-givare har liknande brusprestanda när de drivs med stabil excitation och är det bästa valet när frekvenser under 0,5 Hz ska analyseras, eftersom de inte kräver högpassfiltrering och därmed bevarar signalen över hela frekvensområdet.