




¿Qué es un sistema de navegación inercial?

November 20, 2023
En este artículo aprenderemos sobre IMU (unidades de medición inercial) e INS (sistemas de navegación inercial), describiéndolos con suficiente detalle para que usted:
Ver qué son los sistemas inerciales y qué pueden hacer.
Aprender cómo funcionan los sistemas inerciales.
Comprender cómo se utilizan los sistemas inerciales en una variedad de aplicaciones.
¿Qué es una IMU o sensor IMU?
Una IMU es una abreviatura de Unidad de Medición Inercial. Son los sensores, incluidos giroscopios y acelerómetros, los que miden la posición angular y el desplazamiento de un objeto en el espacio tridimensional.
¿Qué es un INS?
Un INS es una abreviatura de Sistema de Navegación Inercial. Incluye los sensores IMU y sus giroscopios y acelerómetros, así como un sensor para recibir datos de posición absoluta de los satélites GNSS en el espacio. Además, puede estar equipado con magnetómetros para medir campos magnéticos en el espacio tridimensional.
Un INS agrega procesamiento de datos avanzado, incluido el filtrado de Kalman y otros procesamientos. Haciendo referencia a la posición inicial conocida, utiliza las salidas de la IMU para determinar la posición y el vector en tiempo real de un objeto. Este “objeto” puede ser un automóvil, un submarino, un avión o cualquier máquina que opere en el espacio tridimensional.
¿Por qué necesitamos sistemas de navegación inercial?
Casi todos los automóviles, aviones, barcos y teléfonos inteligentes de la actualidad tienen algún tipo de sistema de navegación. Su ubicación se puede mostrar en un mapa utilizando datos de posición de trilateración de satélites GPS/GNSS en el espacio o, en el caso de su teléfono inteligente, una posición de trilateración de torres de telefonía celular que se encuentran en ubicaciones fijas conocidas.
Pero ¿qué pasa si no tenemos acceso a satélites o torres de telefonía móvil? Por ejemplo, ¿cómo navega un submarino? Una vez que un submarino se sumerge y se aleja de un punto de partida conocido, no tiene acceso a satélites ni a ninguna otra fuente externa de datos de posición.
¡No hay "GPS" bajo el agua! Entonces, ¿cómo sabe la tripulación del submarino dónde se encuentran? ¿Cómo saben exactamente a qué velocidad se están moviendo y su posición, orientación, rumbo y rumbo exactos en un mundo submarino tridimensional? Los sistemas INS son la respuesta.
En un ejemplo menos dramático, ¿qué pasa con los vehículos de motor que viajan a través de túneles u otras obstrucciones al sistema satelital GPS/GNSS o a las torres de telefonía celular? ¿Cómo pueden realizar un seguimiento de su ubicación y vector?


Aquí es donde entra en juego los INS (sistemas de navegación inercial). Un INS utiliza una colección de acelerómetros, giroscopios y magnetómetros extremadamente precisos combinados con procesamiento avanzado para calcular la posición de un objeto en relación con un punto de partida, velocidad y dirección conocidos. Una vez que el INS de un submarino se calibra con respecto a un punto de referencia conocido, puede realizar una “estimación” con mucha precisión a partir de ese punto en adelante.
Un sistema que utiliza "estimación" utiliza una posición inicial conocida y luego agrega los datos IMU/INS a esa posición para deducir la posición y el vector actuales del objeto. Ningún INS es perfecto, por lo que las imprecisiones se acumularán cuanto más tiempo dure el sistema.
En el caso de los submarinos, a menudo están ubicados bajo el agua a una profundidad tan profunda que no pueden desplegar una antena que flote en la superficie y se conecte al GPS y otros sistemas GNSS en el espacio. Entonces, cuando no pueden conectarse al GPS/GNSS, utilizan su sistema INS para “calcular” su posición. Los submarinos militares modernos están equipados con módulos INS increíblemente precisos y de baja deriva.
Cuando los satélites y otras referencias externas vuelven a estar disponibles, el sistema se recalibra, eliminando cualquier error que se haya acumulado durante el tiempo de navegación a estima. El INS también se utiliza en aviones comerciales y militares, naves espaciales, misiles, drones y robots, e incluso está integrado en muchos teléfonos móviles y controladores de videojuegos.


La navegación inercial se puede utilizar como un “sistema alternativo” que puede tener en cuenta durante un momento en que la navegación GPS/GNSS no esté disponible. Pero en el caso de los submarinos y las naves espaciales, son el principal método de navegación. Las aeronaves y otros vehículos suelen utilizar el INS en estrecha colaboración con GPS/GNSS y otras referencias de posición absoluta.
IMU: el corazón palpitante de cada INS
Dentro de cada INS se encuentra la importantísima IMU. Una IMU es un paquete de sensores que contiene al menos tres giroscopios ortogonales y tres acelerómetros ortogonales. A veces también están equipados con tres magnetómetros que miden los momentos dipolares magnéticos, también conocidos como campos magnéticos. Las IMU se utilizan para medir los objetos:
Velocidad angular: la velocidad a la que un objeto gira alrededor de su eje.
Fuerza específica: la diferencia entre aceleración absoluta y aceleración gravitacional
Orientación: la posición del objeto en el espacio tridimensional.
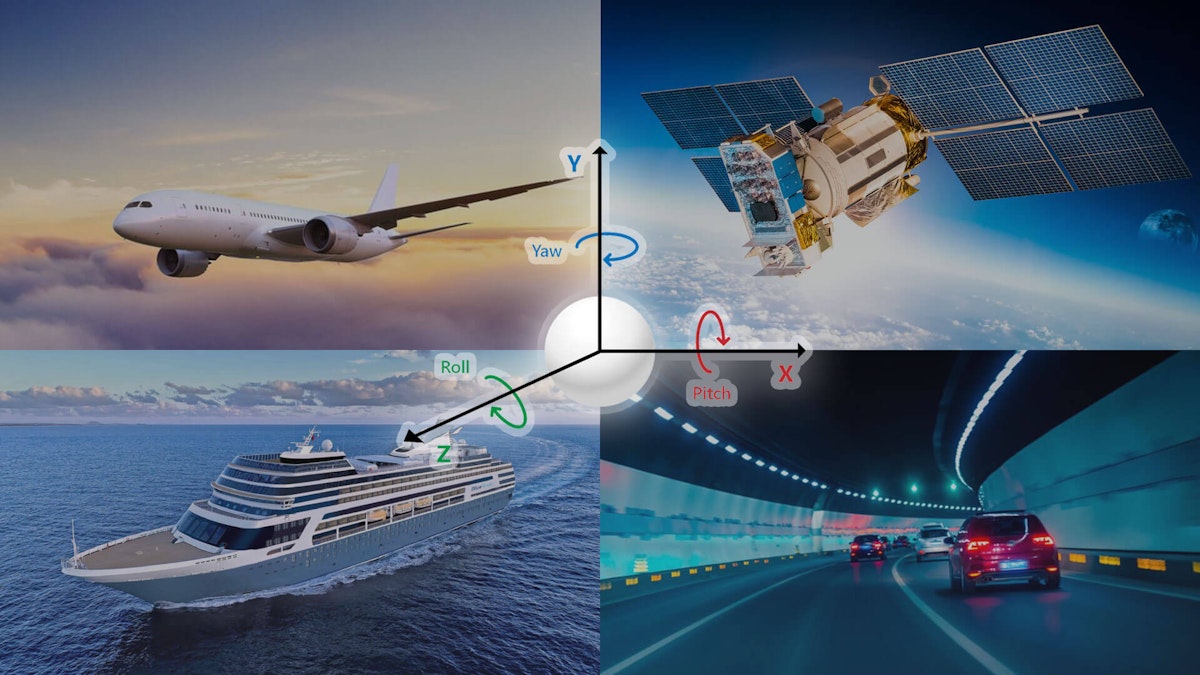
Básicamente, cada uno de los tres ejes principales (X, Y y Z, también conocidos como roll, pitch, y yaw) está equipado con al menos un acelerómetro, un giroscopio y (normalmente) un magnetómetro.


¿Por qué necesitamos tres conjuntos de sensores?
Un único sensor inercial sólo puede medir a lo largo de un único eje. Pero nos movemos en un espacio tridimensional, por lo que montamos tres sensores inerciales juntos en un grupo ortogonal.
Un sistema inercial que consta de tres acelerómetros y tres giroscopios se denomina sistema de 6 ejes (dos mediciones a lo largo de tres ejes son un total de seis mediciones). Cuando queremos detectar los campos magnéticos con fines de navegación, agregamos un magnetómetro a lo largo de cada eje, para un total de nueve sensores.
Una IMU típica mide la velocidad angular bruta del objeto al que está conectada. También mide la fuerza/aceleración específica y los campos magnéticos.
Cuando agregamos procesamiento de señales avanzado y filtrado de datos, como el filtrado de Kalman, que se describe en las siguientes secciones, nuestra IMU se convierte en parte de un sistema más grande llamado INS o sistema de navegación inercial. Cuando se utiliza para la navegación, también podemos referirnos a un INS como AHRS, o Sistema de Referencia de Actitud y Rumbo.
¿Cuál es la diferencia entre una IMU y un INS?
La IMU (unidad de medición inercial) es esencialmente el subsistema de sensores de un INS (sistema de navegación inercial). El INS toma las salidas sin procesar de la IMU, las procesa y calcula los cambios en el movimiento relativo de un objeto. El INS hace referencia a estos cambios al punto de partida, la velocidad y la dirección conocidos, proporcionando una posición en tiempo real y una salida vectorial.
Las IMU pueden integrarse completamente en un INS o pueden ser piezas de hardware independientes que se conectan a un INS externo o un sistema similar.
El INS calcula y genera:
Actitud: pitch, roll, y yaw en el centro de gravedad del objeto.
Posición, velocidad de posición y orientación en un espacio tridimensional
Velocidad lineal: una cantidad vectorial que consta tanto de magnitud como de dirección
Velocidad angular: la velocidad a la que un objeto gira alrededor de su eje.
Tecnologías clave del INS
Receptores GNSS
Para conectarse a los satélites en el espacio se requiere un sensor. Un sensor “GPS” o GNSS suele ser una estructura sellada en forma de cúpula con antenas en su interior. Debe colocarse con línea de visión hacia el cielo para poder recibir datos de las distintas constelaciones GNSS ubicadas en el espacio.


Learn more about:

Giroscopios
Los sensores inerciales se crearon mucho antes que los semiconductores. Los giroscopios mecánicos clásicos son estructuras mecánicas que consisten en un rotor giratorio que puede adoptar cualquier orientación.
Debido a la conservación del momento angular, la orientación del rotor no se ve afectada por la inclinación o rotación de cualquier parte del marco exterior o de los cardanes interiores.

Hoy en día, el giroscopio mecánico todavía se utiliza mucho en aplicaciones que requieren la mayor precisión y estabilidad a largo plazo. Siguen siendo el sensor preferido, por ejemplo, para los submarinos. Un submarino grande tiene mucho espacio para esta gran estructura mecánica y su peso no es una gran preocupación.
Pero a partir de la década de 1960, se desarrollaron nuevas tecnologías que permitieron que un dispositivo más pequeño, liviano y de estado sólido actuara como un giroscopio muy preciso. Éstas incluyen:
RLG - Giroscopios láser de anillo
FOG - Giroscopio de fibra óptica
Giroscopios de cuarzo/MEMS
Giroscopio láser de anillo (RLG)
Los giroscopios láser de anillo funcionan según el principio del efecto Sagnac. Un único láser se divide en dos haces que se mueven dentro del anillo en direcciones opuestas. El sensor mide el patrón de interferencia provocado por el movimiento de la estructura, a lo largo de un solo eje.
El RLG suele estar lleno de helio-neón. Los electrodos excitan ondas de luz que viajan en direcciones opuestas. La invención del giroscopio láser de anillo se atribuye ampliamente a los ingenieros aeroespaciales de Honeywell en la década de 1960.
Aprende más sobre el giroscopio láser de anillo
Giroscopio de fibra óptica (FOG)
Los giroscopios FOG son similares a los giroscopios RLG y detectan movimiento mediante el efecto Sagnac. Los rayos láser se inyectan en un único cable de fibra óptica, pero viajan en direcciones opuestas. El rayo que se mueve en la dirección de rotación del marco llega un poco más rápido que el otro rayo. La interferometría se utiliza para medir este cambio de fase y calcular la cantidad de movimiento.
Aprende más sobre el giroscopio de fibra óptica
Giroscopio de cuarzo/MEMS
MEMS significa "sistemas microelectromecánicos". Se trata de pequeños sensores y dispositivos que se pueden fabricar utilizando muchos de los mismos métodos con los que se fabrican los semiconductores. Por lo tanto, es posible construir un giroscopio lo suficientemente pequeño y económico como para instalarlo en un teléfono inteligente, un controlador de videojuegos y miles de máquinas más.
Los cristales de cuarzo reaccionan al movimiento y funcionan como un sensor Coriolis. Junto con un resonador de diapasón, un sensor de cuarzo produce una salida que puede ser procesada por la microelectrónica integrada. A pesar de su pequeño tamaño y costo relativamente bajo, los giroscopios MEMS son lo suficientemente precisos para una amplia gama de aplicaciones.
Aprende más sobre los giroscopio MEMS
Tipos de sensores giroscópicos por aplicación
Según su precisión y rendimiento de deriva, los giroscopios se pueden agrupar aproximadamente en cuatro categorías:
Consumo: teléfonos inteligentes, consolas de juegos y otros productos de consumo.
Industrial: UAV (vehículos aéreos no tripulados), incluidos drones; procesos y entornos de fabricación.
Armas inteligentes y equipo militar relacionado.
Navegación: aviones, naves espaciales, submarinos, automóviles, vehículos agrícolas y de construcción, vehículos militares terrestres.
A continuación se ofrece una descripción general de cómo las diversas tecnologías de giroscopio encajan en estas aplicaciones. Los giroscopios RLG, FOG y Cuarzo/MEMS se utilizan en la más amplia gama de aplicaciones. RLG y FOG han reemplazado a los giroscopios mecánicos en algunas aplicaciones, pero no en todas. Los giroscopios mecánicos siguen proporcionando la mejor estabilidad a largo plazo y, por lo tanto, se prefieren para aplicaciones críticas de navegación a estima en submarinos y algunos aviones.
Comparación de los principales tipos de giroscopios
| / | Mechanical | FOG | RLG | Cuarzo/MEMS |
|---|---|---|---|---|
| Aplicaciones | Submarinos, naves espaciales, aviones. | Armas inteligentes, muchas aplicaciones automotrices, comerciales y militares, aeroespaciales y de navegación. | Armas inteligentes, muchas aplicaciones automotrices, comerciales y militares, aeroespaciales y de navegación. | Mercados de grado de consumo, grado industrial y grado táctico |
| Pros | La mejor estabilidad a largo plazo | Pequeños, de estado sólido, resistentes y menos costosos que los giroscopios mecánicos. | Pequeños, de estado sólido, resistentes y menos costosos que los giroscopios mecánicos. | Igual que RLG y FOG, pero aún más pequeño y menos costoso |
| Contras | Alto costo, estructura relativamente grande/pesada | Carecen de la estabilidad a largo plazo de los giroscopios mecánicos. | Carecen de la estabilidad a largo plazo de los giroscopios mecánicos. | Carecen de la estabilidad a largo plazo de los giroscopios mecánicos. |
Acelerómetros
Los acelerómetros son sensores que miden un cambio de velocidad a lo largo del tiempo. Hay varias tecnologías clave que se utilizan para crear estos sensores. Son esencialmente una masa "de prueba" suspendida por un resorte. La dirección longitudinal del resorte se llama "eje de sensibilidad".
Cuando el sensor se somete a un cambio de velocidad a lo largo de este eje, la masa de prueba se moverá, comprimiendo el resorte. La cantidad de esta compresión es proporcional a la aceleración, por lo que podemos medir y generar este valor. La aceleración se mide en g (también conocida como “fuerza G”), también conocida como metros por segundo al cuadrado.



Magnetómetros
Todo el mundo conoce la antigua brújula: una aguja magnetizada puede apuntar libremente hacia el norte magnético de la Tierra, situado cerca del polo norte. Una brújula es un magnetómetro en el sentido más elemental. Sin embargo, para nuestros sistemas IMU e INS, necesitamos medir los campos magnéticos con mucho más detalle.


Los magnetómetros pueden basarse en una variedad de tecnologías, incluido el efecto Hall, el magnetodiodo, los MEMS de fuerza de Lorentz, el fluxgate y muchos más. Los sensores magnetómetros basados en MEMS son especialmente populares hoy en día porque pueden fabricarse para que sean bastante pequeños, precisos y económicos. En muchos de los sistemas IMU, INS y AHRS actuales, los magnetómetros proporcionan una referencia de rumbo tridimensional.
Aprende más sobre el magnetómetro
Filtrado de Kalman
El filtrado de Kalman es un algoritmo que esencialmente fusiona datos de sensores con datos predictivos. Esta es una ecuación cuadrática lineal en tiempo real de dos etapas, donde la primera etapa predice y pondera la precisión de varias entradas, y la segunda etapa aplica un promedio ponderado a las entradas. Este proceso recursivo mejora la precisión de los resultados de navegación de los sistemas GPS/GNSS y es parte integral de la precisión de la navegación inercial.
Aprende más sobre el Filtrado de Kalman
Aplicaciones Inerciales
Los sistemas INS se utilizan ampliamente en una variedad de aplicaciones. Casi todos ellos se centran en la navegación, incluidos:
Navegación para vehículos de carretera: automóviles, camiones, autobuses, motocicletas.
Navegación aérea: aviones comerciales y militares.
Navegación todoterreno: vehículos militares, vehículos agrícolas, tractores, vehículos agrícolas, etc.
Navegación espacial: naves espaciales y satélites
Navegación naval submarina y de superficie: barcos, barcos y submarinos
Túneles de minería y perforación: cálculo de distancia y dirección bajo tierra
Guía de armas: misiles y otras municiones guiadas
Pruebas de vehículos de carretera: pruebas ADAS (sistema avanzado de asistencia a la conducción) de vehículos autónomos, pruebas en pista de pruebas
Obtenga más información sobre ADAS: sistemas avanzados de asistencia a la conducción




Soluciones Dewesoft IMU e INS
DS-IMU1
DS-IMU1 es un sistema de navegación asistido por GPS en miniatura, robusto y confiable con una velocidad de datos de salida de hasta 100 Hz.
Características clave:
Combina sensores inerciales con un receptor GNSS acoplados en un sofisticado algoritmo de fusión para ofrecer navegación y orientación precisas y confiables.
El receptor GNSS admite sistemas GPS, GLONASS, BeiDou, GALILEO, WAAS, EGNOS y GAGAN
Protección ambiental IP67 y MIL-STD-810G
Velocidad de datos de salida de hasta 100 Hz
Conectado a través de USB
Rápido y fácil de instalar


Navion i2
Dewesoft NAVION i2 es una plataforma de medición inercial compatible con GNSS que mide orientación, posición, velocidades y aceleraciones.
Características clave:
Basado en Ethernet, que permite la conexión remota al sistema directamente a través de DS-WIFI4
Receptor GNSS de doble frecuencia
RTK con precisión de posición de 1 cm
DGNSS, aumento SBAS compatible
Medición de antena GNSS dual para una salida precisa del rumbo estático
Salida PPS para sincronización de dispositivos
Rápido y fácil de instalar


DS-GYRO1
El Dewesoft DS-GYRO1 es una unidad de navegación inercial en miniatura, robusta y confiable.


Características clave:
Combina sensores inerciales en un sofisticado algoritmo de fusión para ofrecer una orientación precisa y confiable
Protección ambiental IP67 y MIL-STD-810G
Velocidad de datos de salida de hasta 500 Hz
Se conecta mediante USB
Rápido y fácil de instalar
Soporte para sistemas INS y GNSS de terceros
El software DewesoftX (y, por lo tanto, todos los sistemas DAQ de Dewesoft) son compatibles con una amplia gama de sensores INS e IMU de terceros, que incluyen:
Todos los dispositivos GNSS compatibles con NMEA (de varios fabricantes)
Sensores inerciales Oxford OXTS
Sistemas inerciales Genesys ADMA
GNSS marca Topcon
GNSS marca Novatel
Resumen
Esperamos que este artículo le haya ayudado a comprender qué son los sistemas IMU e INS y cómo funcionan. Ha visto lo importantes que son para una amplia gama de aplicaciones. Sin ellos, los submarinos y las naves espaciales no podrían navegar, y los vehículos terrestres y los aviones lo pasarían muy mal.
Probar las funciones avanzadas de asistencia al conductor en los automóviles actuales sería casi imposible con GPS/GNSS y tecnologías relacionadas. A medida que las máquinas, los vehículos de todo tipo, los drones y los robots formen cada vez más parte del mundo moderno, la necesidad de GNSS y sistemas de navegación no hará más que aumentar.
Acrónimos y definiciones clave
El mundo de IMU e INS está lleno de nombres y acrónimos a veces crípticos que es útil conocer. Estos son algunos de los más utilizados en este mundo y en temas relacionados mencionados en este artículo:
| Acronym | Definition |
|---|---|
| AHRS | Attitude and Heading Reference Systems. |
| BeiDou | La constelación de satélites y el sistema de navegación de China. |
| DGNSS | GNSS diferencial: un sistema de aumento terrestre que mejora la precisión hasta el nivel de 1 a 3 cm. Cuando el GPS es la única constelación utilizada, se denomina DGPS (ver más abajo); en caso contrario, se denomina DGNSS. |
| DGPS | GPS diferencial: un sistema de aumento terrestre que mejora la precisión hasta el nivel de 1 a 3 cm. |
| EGNOS | El Servicio Europeo de Navegación Geoestacionaria por Complemento: sistema regional europeo de aumentación basado en satélites (SBAS) |
| FOG | Giroscopio de fibra óptica: un sensor que utiliza el efecto Sagnac para medir el movimiento. |
| GAGAN | Navegación aumentada GEO asistida por GPS: el sistema de navegación regional de la India. |
| GALILEO | Sistema de posición global: una constelación de satélites de navegación desplegados por la Unión Europea y disponibles para aplicaciones de navegación comercial en todo el mundo. |
| GLONASS | Sistema global de navegación por satélite: el sistema de navegación por satélite de Rusia. Funciona con GPS para proporcionar información de posición. |
| GNSS | Sistema global de navegación por satélite: término general que se refiere a cualquier constelación de satélites que proporcionen servicios de posicionamiento, navegación y sincronización (PNT). |
| GPS | Sistema de posición global: una constelación de satélites de navegación desplegados por EE. UU. y disponibles para aplicaciones de navegación comercial en todo el mundo. |
| IMU | Unidad de medición inercial: instrumento que mide la fuerza, la velocidad/velocidad angular y la orientación específicas de un objeto mediante acelerómetros, giroscopios y, a menudo, magnetómetros. |
| INS | Sistema de navegación inercial: un instrumento que utiliza un procesador de computadora y sensores de movimiento (acelerómetro y giroscopios que generalmente se encuentran en una IMU) para calcular la posición, la orientación, la dirección y la velocidad de movimiento de un objeto usando “estimación”, es decir, sin necesidad de referencias externas. |
| IP67 | Protección de ingreso: códigos definidos en IEC 60529, que clasifican los instrumentos y otros artículos según el grado de protección que brindan contra el polvo, el contacto accidental y el agua. Consulte EN 60529 para obtener detalles completos. El primer número del código de dos dígitos va del 0 al 6, donde 0 significa 0% de protección y 7 significa 100% de protección contra el polvo y la arena. El segundo número va del 0 al 8 y representa la protección contra líquidos, donde 0 significa 0% de protección y 8 significa 100% de protección. El nivel de protección IP67 de varios productos Dewesoft es un índice de protección de ingreso muy alto. |
| Filtro Kalman | Los filtros de Kalman son una ecuación cuadrática lineal en tiempo real de dos etapas, donde la primera etapa predice y pondera la precisión de varias entradas, y la segunda etapa aplica un promedio ponderado a las entradas. |
| LAAS | Sistema de aumento de área local: una corrección diferencial en tiempo real del GPS utilizada principalmente en aeropuertos, que proporciona datos de posición mejorados con una precisión superior a los aviones comerciales que aterrizan en ese aeropuerto o salen de él. |
| MEMS | Los “sistemas microelectromecánicos” son sensores y otros dispositivos que se componen de componentes de entre 1 y 100 micrómetros de tamaño. Se pueden fabricar utilizando los mismos tipos de métodos utilizados para fabricar semiconductores, incluido el grabado y la litografía por haz de electrones. |
| MIL-STD 810G | Un estándar militar de EE. UU. que define qué tan bien funcionará un dispositivo contra golpes, vibraciones y otros extremos ambientales. MIL-STD-810G es un nivel específico dentro del estándar general. Existe una variedad de estándares y especificaciones MIL-STD, también conocidos como "MIL SPEC", mantenidos por el ejército de EE. UU. |
| NMEA | NMEA 0183 es una especificación que define la especificación eléctrica y el protocolo que permite la comunicación entre dispositivos como pilotos automáticos, ecolocalizadores, SONAR, anemómetros, GPS, INS, IMU e instrumentos relacionados. NMEA es un acrónimo de Asociación Nacional de Electrónica Marina. |
| RLG | Giroscopio láser de anillo: un sensor que utiliza el efecto Sagnac para medir el movimiento. |
| RTK | Cinemática en tiempo real: (también conocido como “posicionamiento cinemático en tiempo real”), un sistema de topografía local y corrección de datos GPS/GNSS para lograr una precisión local a nivel de centímetros. Se emplea habitualmente, por ejemplo, en pistas de pruebas de automóviles. |
| SBAS | Sistema de aumento basado en satélites: normalmente un sistema terrestre de sensores que se utiliza para aumentar/mejorar la precisión a nivel local o regional de varios sistemas GNSS. |
| UAV | Vehículo aéreo no tripulado: aeronave que opera de forma autónoma o mediante control remoto. Un UAV no tiene piloto ni tripulación humana a bordo. Un dron es un ejemplo de UAV. |
| WAAS | Sistema de aumento de área amplia: un SBAS (sistema de aumento basado en satélites) desarrollado por la FAA (Autoridad Federal de Aviación) de EE. UU. para aumentar el sistema GPS de Estados Unidos. |