




Medición de RPM, ángulo y velocidad mediante sensores digitales, encoders y contadores

May 5, 2020
En este artículo, analizaremos cómo medir señales digitales, así como encoders digitales, tacómetros y sensores de RPM con los mejores sistemas de adquisición de datos (Data Acquisition Systems DAQ) de la actualidad, con suficiente detalle para que pueda:
Ver cómo funcionan estos sensores
Descubrir cómo se sincronizan los sensores digitales con los datos analógicos
Comprender cómo puede usarlos en sus pruebas
¿Estas listo para empezar? ¡Vamos!
La mayoría de los ingenieros comprenden que los sistemas de adquisición de datos se utilizan para medir señales históricas, como voltajes, temperaturas, corrientes, vibraciones detectadas por acelerómetros, tensión detectada por sensores de galgas extensométricas de puente de Wheatstone y más.
Pero a menudo es necesario medir eventos discretos y señales de ángulo de rotación que son síncronos con los datos del historial de tiempo más comunes. Los eventos discretos son aquellos eventos que tienen solo dos valores posibles, p. Ej. interruptores de encendido / apagado, etc.
A veces se denominan "señales digitales", ya que se componen fundamentalmente de estados de voltaje alto-bajo (también conocido como "encendido / apagado"). En las secciones que siguen, presentaremos algunos ejemplos de estos tipos de señales adicionales y discutiremos cómo se miden y sincronizan mejor con el resto de los datos.
¿Qué son las señales discretas / señales digitales?
Tomemos el caso de un interruptor o sensor de proximidad, que emite un voltaje bajo (0 V en este ejemplo) cuando la unidad bajo prueba (UUT) no está cerca, pero luego emite un voltaje más alto (5 V) cuando el UUT entra dentro del rango . Puede ser necesario registrar este estado discreto en sincronía con nuestro sistema de medición para poner los datos analógicos en contexto. Entonces, ¿cómo podemos hacerlo?


Una forma sencilla es tomar estas señales eléctricas e introducirlas en las entradas analógicas del sistema de medición. Esto funcionará y solo ocupará un canal analógico. Sin embargo, ¿qué pasaría si tuviéramos que registrar los estados de ocho sensores de proximidad ... o diez ... o más?
En ese caso, sería un desperdicio enorme de nuestras entradas analógicas de amplio rango y relativamente costosas usarlas para señales discretas tan simples. Además, a veces las entradas discretas requieren un ancho de banda mayor que el que pueden admitir las entradas analógicas relativamente lentas, por lo que, de nuevo, una entrada analógica puede no ser una buena opción independientemente.
Cuando es necesario adquirir múltiples señales discretas, es más eficiente y mucho menos costoso utilizar una entrada digital diseñada para esta tarea. En el caso de los sistemas DAQ de Dewesoft, como la línea de productos SIRIUS, cada entrada de contador puede manejar una variedad de sensores con salidas digitales discretas, como contadores y encoder, así como varias entradas digitales discretas.
Y dado que los contadores / encoders normalmente funcionan a una velocidad muy alta, la base de tiempo de estas entradas es bastante alta a 102,4 MHz, lo que proporciona un ancho de banda de 10 MHz, muy por encima de las entradas analógicas típicas para la medición física.
La entrada digital más simple es el tipo de señal de encendido / apagado que parece una onda cuadrada si la mira. A veces se los denomina "canales discretos" o "canales de eventos". Dado que solo tienen dos estados, a menudo se usan para mostrar el estado de una puerta abierta o cerrada, o un circuito encendido o apagado, o una cuchilla que pasa, y otras mil posibilidades de sí / no que podríamos necesitar medir.
¿Qué es una señal TTL?
Las entradas discretas normalmente salen de un relé o transductor a niveles TTL (transistor a transistor lógico), que se basan en picos de 5V. En teoría, la señal de encendido / apagado TTL perfecta sería 0V que representa APAGADO (es decir, un valor digital de 0) y 5V representa ENCENDIDO (es decir, el valor digital de 1). Sin embargo, en la práctica, es casi imposible lograr tal precisión, por lo que los rangos aceptables se han convertido en 0 a 0,8 V para APAGADO y 2 V a 5 V para ENCENDIDO.


Entradas digitales / discretas Dewesoft
Las entradas de contador / encoder de Dewesoft proporcionan tres entradas que se pueden utilizar para entradas discretas / digitales. Algunos modelos también proporcionan líneas dedicadas de ED (entrada digital) separadas de las entradas del contador.
Para obtener detalles completos, consulte la sección siguiente Dewesoft SuperCounter® Technology.
¿Qué es contador o encoder?
Los contadores y encoders se dedican al recuento de pulsos. ¿Pero por qué? A veces, la aplicación realmente está contando, pero muy a menudo se hace para medir el ángulo o la posición angular.
Por ejemplo, el volante de su automóvil: es importante saber exactamente en qué dirección se conduce el automóvil en tiempo real. Entonces, un encoder dentro del volante divide los 360° de rotación en miles de pasos discretos. También está configurado de modo que la posición cero (dirección en línea recta) se encuentre en un valor de posición rotacional conocido.
Todas las funciones de seguridad y prevención de colisiones actuales, así como las funciones de conducción autónoma en automóviles de pasajeros, vehículos agrícolas y más, confían en este encoder para conocer la posición exacta del volante en todo momento.
Pero a poca distancia de nuestro volante hay un dial giratorio en el tablero donde puede cambiar el volumen de su radio o cambiar a un canal diferente. Este dial es realmente un encoder con una salida digital que se alimenta a un microcontrolador que lee la posición del encoder que ha seleccionado y le permite recorrer las opciones posibles, dando vueltas y vueltas en cualquier dirección.
Por lo general, el encoder de volumen se configura con una posición de inicio y parada, mientras que el encoder de cambio de canal puede girar alrededor de todas las estaciones. Estas son solo tres aplicaciones de encoder que la mayoría de la gente usa todos los días en sus automóviles.
Aplicaciones de contador y encoder
Los sensores de posición y de posición angular se pueden encontrar en una amplia gama de aplicaciones:
Detección de la posición del volante
Detección de la posición del pedal
Detección de la posición del acelerador
Detección de par
Monitoreo y control de máquinas de proceso (miles de aplicaciones)
Mantener referencias de posición absolutas en máquinas CNC
Control de la posición absoluta del paciente en máquinas CNC y MRI
Posicionar la retroalimentación en robótica de todo tipo
Sistemas electrónicos, especialmente para la interfaz humana.
Aplicaciones de cintas transportadoras
Sensores de estacionamiento
Un sensor de posición angular mide la posición angular de un eje. Los sensores de ángulo están disponibles en una variedad de paquetes y resoluciones, desde simples sensores inductivos que simplemente cuentan cada vez que gira el eje, hasta encoders de alta resolución que proporcionan cientos o incluso miles de posiciones alrededor de la rotación de 360 °, y también informan la dirección de rotación.
Hay varios tipos de sensores de contador y encoder que se utilizan en la adquisición de datos en la actualidad, que incluyen:
| Tipo de sensor | Descripción |
|---|---|
| Sensores de proximidad | Detecta un objeto que se acerca a una distancia prescrita del sensor y emite un pulso. Se utiliza para aplicaciones de conteo, tacómetro y velocidades de rotación. |
| Encoders rotatorios | Sensor de eje giratorio que emite señales A, B y Z con hasta miles de pulsos de resolución alrededor de 360 ° |
| Encoders lineales | La misma tecnología que un encoder rotatorio, excepto que estos encoders funcionan de forma lineal, es decir, en línea recta. |
| Sensores de engranes dentados | Se conocen sensores con el número definido de pulsos por revolución (generalmente 60), a veces con dientes faltantes (60-2) para el ángulo o el punto de partida- |
| Sensores ópticos | Sensor de ángulo óptico sin contacto que detecta un agujero en un disco giratorio o rayas blancas / negras en la cinta fijada a un eje. |
Analicemos cada uno de estos tipos de sensores y veamos cómo se pueden incorporar a los sistemas DAQ actuales.
Sensores de proximidad
Un sensor de proximidad es capaz de detectar un objeto cercano sin hacer contacto con él y luego emite una señal de pulso o voltaje. Hay varios tipos de sensores de proximidad, que se eligen en función de la composición de los objetos que deben detectarse.


Por ejemplo, un sensor de proximidad inductivo crea un campo electromagnético alrededor de su extremo de medición. Según el conocido efecto magnetorresistivo, la resistencia de ciertos objetos (particularmente los ferrosos) cambiará cuando se expongan a campos magnéticos. La mayoría de los sensores de proximidad aprovechan este efecto creando un pequeño campo magnético y luego detectando cuando se interrumpe o cambia significativamente debido a la presencia de dicho material.
Entonces, cuando colocamos un sensor de este tipo cerca de un eje giratorio y luego colocamos una característica ferrosa en el eje que pasará cerca del sensor con cada revolución, tenemos un sensor de velocidad muy confiable y preciso. El sensor detecta la interrupción del campo y emite una señal de pulso o voltaje que cualquier sistema DAQ puede mostrar y registrar.


También hay sensores de proximidad capacitivos que pueden detectar objetos no metálicos, utilizando el principio de acoplamiento capacitivo. En lugar de un campo electromagnético, generan un campo electrostático. Cuando un objeto entra en este campo, cambia la capacitancia en el circuito del oscilador del sensor. Esto es detectado por el sensor que luego crea una salida. En el caso de sensores de proximidad tanto magnéticos como capacitivos, se puede ajustar su sensibilidad al objeto de destino.
Nota: También hay sensores fotoeléctricos que emiten luz y luego detectan cuando se refleja o no. Más sobre esos en la sección Sensores ópticos.
Los sistemas DAQ avanzados como los de Dewesoft pueden contar estos pulsos y realizar todo tipo de operaciones matemáticas en ellos, incluida la conversión a RPM si corresponde, permitir que los valores se restablezcan y más.
Aplicaciones de sensores de proximidad
Conteo de revoluciones por minuto (RPM) del eje giratorio (aplicaciones de tacómetro)
Conteo de piezas que pasan por la línea de producción
Detección de vehículos de intersección (enterrados en la carretera)
Detección de nivel en plantas de envasado y conservas
Detectar la posición de los objetos en la línea de montaje.
Ventajas del sensor de proximidad
Muy fiables porque nunca entran en contacto con los objetos detectados. El desgaste es prácticamente inexistente
Costo inicial y operativo muy bajo
Los tipos capacitivos también se pueden utilizar para medir el espesor.
Los tipos inductivos no se ven afectados por el agua, el barro, etc.
Contras del sensor de proximidad
Distancias de detección limitadas: la mayoría de los sensores inductivos están limitados a 70 mm (2,76 pulg.)
Requieren energía externa
Entrada de Dewesoft aplicable
Las entradas de contador / encoder de Dewesoft se adaptan perfectamente a los sensores de proximidad de todo tipo e incluso pueden proporcionar energía a la mayoría de ellos cuando sea necesario. Para obtener detalles completos, consulte la sección siguiente Dewesoft SuperCounter® Technology.
Encoders rotatorios
Un encoder rotatorio también conocido como "encoder de eje" o "eje encoder" normalmente proporciona una excelente resolución de ángulo, ya que están disponibles con hasta miles de pasos por revolución de 360 °, lo que permite pasos mucho menores de 1 °. Muchos encoders también pueden detectar el sentido de rotación, lo cual es esencial en algunas aplicaciones.


Encoders rotativos incrementales
Los encoders incrementales informan cambios relativos en la posición y la dirección; no registran la posición absoluta (ángulo). Los encoders incrementales emiten señales A y B, que indican cambios en el movimiento y la dirección. Algunos de ellos pueden ser "orientados" o referenciados a una posición particular. Cuando se alcanza esta posición, se genera una señal de salida Z adicional. Los encoders incrementales son los tipos de encoders más comunes y populares.
Usan un encoder de cuadratura para generar sus salidas A y B. Con este método, la diferencia de fase entre las salidas A y B generalmente se establece en + 90 ° cuando la dirección de rotación es en el sentido de las agujas del reloj, y en -90 ° cuando la dirección de rotación es en sentido antihorario. El esquema de fases basado en 90 grados entre las salidas A y B se conoce como "cuadratura".


Cuando el eje no gira, las salidas del encoder A y B son cero.
Cuando el eje está girando, la frecuencia de salida del encoder representa directamente la velocidad del eje con muy alta fidelidad. La resolución del encoder se define por cuántas divisiones se dividen los 360 ° de la rotación de un eje. Con encoders incrementales, esto puede ser desde unos pocos cientos de pasos hasta 10,000 pasos alrededor de una rotación.
Los encoders incrementales emiten cambios en el movimiento y la dirección con una latencia muy baja, lo que los hace ideales para aplicaciones de muy alta velocidad que los encoders absolutos no pueden admitir.
Los pulsos por revolución, también conocidos como PPR, son una característica definitoria de los encoders incrementales. Esto define cuántos pulsos producirá por rotación de 360 ° del eje. Cuanto mayor sea el PPR, mayor será la resolución del encoder.
Es importante que la entrada del contador que conecte a un encoder incremental tenga un ancho de banda lo suficientemente alto para manejar la máxima salida posible. Digamos que estamos usando un encoder 360 PPR, que genera 1 pulso por revolución. Si este encoder gira a 600 RPM, generará:
No hay nada de qué preocuparse con las entradas de contador de Dewesoft, ya que se basan en un reloj interno de 102,4 MHz y pueden manejar fácilmente prácticamente cualquier encoder del mercado actual. Para obtener más información, consulte la sección siguiente. Dewesoft SuperCounter® Technology.
Encoders absolutos
Como su nombre lo indica, los encoders absolutos emiten la posición del eje de corriente absoluta, lo que los hace ideales para mediciones basadas en ángulos. Están disponibles en versiones mecánicas, ópticas y magnéticas.


Mientras que los encoders incrementales emiten un flujo de pulsos, los encoders absolutos emiten valores únicos para cada posición alrededor del eje. Otra distinción es que mientras los encoders incrementales simplemente emiten sus pulsos A, B y Z cuando el eje gira, los encoders absolutos deben ser interrogados por el sistema de medición. A continuación, generan una palabra de datos única de varios bits que indica la posición exacta del eje. Esta palabra es un valor único y no tiene que decodificarse.
Aunque no son tan “rápidos” como los encoders lineales, los encoders absolutos proporcionan una resolución posicional más alta que los encoders incrementales. Tenga en cuenta que, dado que estos sensores no tienen salidas de pulsos, no se pueden utilizar con entradas de Dewesoft SuperCounter. Requieren una interfaz digital que pueda leer las lecturas multibit. Las interfaces comunes disponibles para encoders absolutos incluyen serial, Fieldbus y Ethernet.
Aplicaciones del encoder rotatorio incremental
Productos de consumo: posición del trackball, controles de sistemas de entretenimiento
Manipulación de materiales: medición de velocidad de motores, transportadores, sistemas de llenado
Fabricación de PCB: medición de posición de sistemas de pick and place
Textiles, metales, pulpa y papel: mediciones de velocidad, posición y distancia de la máquina
Aeroespacial: retroalimentación de la posición del actuador y posicionamiento de la antena
Ventajas del encoder rotatorio incremental
Alta velocidad y baja latencia.
Alta resolución (hasta miles de valores discretos alrededor de una rotación de 360 °)
Salida de posición "inicial" Z disponible
Altamente confiable y preciso
Contras del encoder rotatorio incremental
Posible interferencia de RF y EM con encoders magnéticos
Posible interferencia de luz con encoders ópticos
Puede estar contaminado por entornos hostiles
Entrada de Dewesoft aplicable
Las entradas de contador / encoder de Dewesoft se adaptan perfectamente a encoders incrementales de todo tipo y admiten una amplia gama de modos de funcionamiento, incluidos X1, X2 y X4. Para obtener detalles completos, consulte la sección siguiente Dewesoft SuperCounter® Technology.
Encoders lineales
Un encoder lineal mide la posición a lo largo de una ruta lineal. A diferencia de un encoder rotatorio que tiene una placa circular en el interior que le permite medir la posición del eje, la mayoría de los encoders lineales se mueven a lo largo de una escala externa y determinan su posición a partir de las marcas en la escala.


Un ejemplo perfecto es una impresora de inyección de tinta, que utiliza un encoder lineal para mover con precisión el cabezal de impresión hacia adelante y hacia atrás a lo largo del ancho del papel durante la impresión. Obviamente, se requiere alta resolución y precisión en esta y en muchas otras aplicaciones.
La tecnología de detección más común que se utiliza con los encoders lineales es la óptica; sin embargo, hay encoders que también emplean tecnología magnética, capacitiva e inductiva. Los encoders ópticos proporcionan la mayor precisión y la resolución más alta posible; sin embargo, se debe tener cuidado para evitar que los contaminantes interfieran con su funcionamiento bloqueando su "visión".
Hay encoders lineales de salida analógica y digital. Los sistemas de adquisición de datos de Dewesoft se adaptan mejor a las salidas digitales ya que proporcionan salidas A y B muy similares a los encoders rotativos incrementales como se describe en la sección anterior.
Aplicaciones del encoder lineal
Maquinas CNC
Impresoras de inyección de tinta
Escáneres láser
Sistemas de montaje pick-and-place
Robótica
Ventajas del encoder lineal
Muy fiables porque nunca entran en contacto con los objetos detectados. El desgaste es prácticamente inexistente
Costo inicial y operativo muy bajo
Los tipos capacitivos también se pueden utilizar para medir el espesor.
Los tipos inductivos no se ven afectados por el agua, el barro, etc.
Contras del encoder lineal
Distancias de detección limitadas: la mayoría de los sensores inductivos están limitados a 70 mm (2,76 pulg.)
Requieren energía externa
Entrada de Dewesoft aplicable
Las entradas de contador / encoder de Dewesoft se adaptan perfectamente a los encoders lineales incrementales digitales. Para obtener detalles completos, consulte la sección siguiente Dewesoft SuperCounter® Technology.
Sensores para engranes dentados
Este sensor basado en ángulos está compuesto por un engrane con dientes alrededor de su circunferencia que están montados en un eje de motor, además de un sensor de proximidad de algún tipo colocado de manera que cuando los dientes del engranaje pasen, sean detectados. Esto proporciona más resolución que un sensor de proximidad que detecta solo una característica por revolución de un eje, pero no tanta resolución como un encoder rotatorio, que puede tener en efecto miles de “dientes” alrededor de una revolución.
Este sensor de proximidad es típicamente de efecto Hall, pero otros son posibles. Los sensores de engranes dentados son ideales para medir la velocidad de un motor. Tal sensor es análogo a un tacómetro.

El sensor de proximidad de efecto Hall detecta la variación en el flujo que se encuentra en el espacio de aire entre un imán y los dientes de engranes ferrosos que pasan. En los sistemas DAQ modernos, la señal se convierte en una onda cuadrada binaria que es inmune a los requisitos de orientación y puede seguir la velocidad del engranaje hasta detenerse por completo ... y detectar el primer diente del engranaje que pasa inmediatamente al encenderse.
Tenga en cuenta que la mayoría de los sensores de efecto Hall pueden detectar no solo los dientes de los engranes que pasan, sino que también pueden usarse para detectar agujeros en discos y placas, características ferrosas (por ejemplo, pernos) agregadas a una amplia variedad de discos y placas y muescas en los ejes árboles de levas.


Un sensor de engrane dentado plano típico tiene 60 dientes de engranaje alrededor de su circunferencia, donde cada diente representa 6 ° de la rotación del eje de 360 °. En consecuencia, el sensor solo puede generar una onda cuadrada positiva cuando pasa cada diente. A partir de ese recuento y el correspondiente tren de pulsos, un buen sistema DAQ puede derivar las RPM.
Pero no podemos conocer el punto muerto superior, o cualquier otra referencia absoluta, porque esta configuración de engrane dentado no proporciona ninguna referencia. En otras palabras, no podemos saber cuál de los 60 dientes está detectando nuestro sensor, por lo que no hay forma de saber la posición del eje.
Entonces, mientras que en aplicaciones donde es necesario conocer el ángulo del eje en sí, necesitamos usar un engrane dentado al que le faltan dientes.
Engrane dentado con dientes faltantes
Una práctica común es usar un sensor de engrane dentado donde faltan 2 de los 60 dientes. El espacio se utiliza para informar el punto muerto superior o la posición inicial del eje. El conocimiento del punto de partida o del punto muerto superior es esencial en algunas aplicaciones. Estos se conocen comúnmente como "sensores 60-2".


Los dientes "faltantes" se utilizan como identificación para que el sensor pueda reconocer la posición angular exacta del cigüeñal. Los dos dientes que faltan se pueden colocar en el eje en cualquier ángulo deseado, por ejemplo, en la ubicación del punto muerto superior.

Tenga en cuenta que también hay sensores de engrane dentado en cuadratura disponibles que emiten señales A y B desfasadas 90 ° entre sí. Estos tipos también proporcionan la dirección de rotación en sistemas donde el eje puede girar tanto en sentido horario como antihorario.
Aplicaciones del sensor para engrane dentado
Medición de RPM de ejes giratorios
Análisis de combustión del motor
Estudios de vibraciones torsionales y rotacionales
Ventajas de los sensores para engranes dentados
Suele ser muy resistente y difícil de romper.
Costo inicial y operativo muy bajo
Desventajas del sensor para engrane dentado
En algunos sistemas, puede resultar difícil instalar el equipo
Distancias de detección limitadas: la mayoría de los sensores inductivos están limitados a 70 mm (2,76 pulg.)
Resolución de ángulo limitada en comparación con los encoders, que pueden proporcionar cientos e incluso miles de pasos alrededor de la rotación de 360 ° del eje.
Entrada de Dewesoft aplicable
Las entradas de contador / encoder de Dewesoft se adaptan perfectamente a configuraciones de sensores para engranes dentados con prácticamente cualquier número de dientes, con o sin dientes faltantes, así como configuraciones de sensores de engranes dentados en cuadratura. Para obtener detalles completos, consulte la sección siguiente Dewesoft SuperCounter® Technology.
Sensores ópticos
Los sensores ópticos consisten en un disco con orificios o marcas en blanco y negro alrededor de su circunferencia o cinta que está montada en el eje giratorio. Un sensor óptico de infrarrojos está montado muy cerca de las marcas. Emite un pulso cada vez que pasa un agujero o una marca negra. Estos discos están disponibles en distintas resoluciones. Un disco con 360 marcas tendría una resolución de 1 °, por ejemplo.


También hay sensores de cinta óptica, que consisten en un sensor óptico y una cinta adhesiva con rayas blancas y negras impresas. La cinta rayada se envuelve alrededor de un eje de la raya, con el sensor óptico apuntando hacia él. El sensor hace rebotar la luz en la cinta y puede detectar cada marca negra y convertirla en un pulso de salida.
También hay tacómetros ópticos, que proyectan luz visible en una rueda o eje giratorio y utilizan los reflejos para contar características en el eje o rueda para calcular las RPM. La mayoría de estos son dispositivos portátiles que proporcionan una lectura en una pantalla, pero que no tienen una salida eléctrica que podamos registrar.


Ya sea que se trate de una configuración de sensor óptico basada en disco o en cinta, el resultado es efectivamente el mismo: obtenemos una salida de pulsos que podemos ingresar en nuestro sistema DAQ. Dewesoft ofrece un sensor de cinta llamado DS-TACHO-4. Tiene un ancho de banda de 100 kHz y un conveniente umbral de detección ajustable.


Cuando envuelva la cinta alrededor de un eje, habrá un punto de transición. Es posible agregar cinta negra a este punto para crear una franja negra triple. El sensor óptico puede usar esto como punto de referencia, por lo que tenemos un ángulo o posición conocidos.


Aplicaciones de sensores ópticos
Contando RPM de un eje giratorio
Mediciones del rendimiento del motor
Monitoreo de velocidad del motor
Análisis de combustión
Medidas de vibración torsional
Medidas de vibración rotacional
Ventajas del sensor óptico
Muy fiables porque nunca entran en contacto con los objetos detectados. El desgaste es prácticamente inexistente
Puede detectar el punto de referencia (raya negra doble o triple)
Desventajas del sensor óptico
Distancias de detección limitadas (sensores de cinta típicamente 2 ~ 5 mm)
Las marcas blancas / negras de la cinta pueden ensuciarse en algunos entornos e interferir con sus lecturas.
Los líquidos pueden interferir con el funcionamiento del sensor óptico
Requiere energía externa
Entrada de Dewesoft aplicable
Las entradas de contador / encoder de Dewesoft se adaptan perfectamente a sensores ópticos de todo tipo. Para obtener detalles completos, consulte la sección siguiente Dewesoft SuperCounter® Technology.
Contadores digitales
¿Qué es un contador digital?
Un contador electrónico es un circuito de entrada digital que cuenta la cantidad de pulsos que ingresan desde sensores de proximidad, encoders y dispositivos similares. El tipo más simple de contadores digitales rastrea y cuenta el tiempo y los pulsos. Al igual que un cronómetro, se pueden restablecer y pueden contar hasta un cierto valor.


Los contadores simples proporcionados por la mayoría de los fabricantes generalmente brindan una amplia capacidad cuando se usan por sí mismos, pero cuando son parte de un sistema de adquisición de datos que mide simultáneamente datos analógicos y quizás incluso entradas adicionales, como datos de bus CAN, datos de PMC, cuadros de video, etc. . rara vez proporcionan sincronización en tiempo real a través de todas estas entradas. Aquí es donde entra en juego la tecnología SuperCounter de Dewesoft.
Dewesoft SuperCounter® Technology
Dewesoft SuperCounter® es compatible con una amplia gama de encoders, sensores de engranes dentados, sensores de proximidad, etc. Los sistemas Dewesoft como SIRIUS, DEWE-43A, MINITAURs, KRYPTON, etc. pueden configurarse con una o más entradas SuperCounter. Por lo general, se proporcionan en un conector LEMO de bloqueo resistente, pero hay otras posibilidades de conector con algunos modelos.


Normalmente hay tres entradas, porque los encoders lo requieren, como describiremos en la sección de encoders a continuación. Si desea medir entradas discretas (señales TTL de encendido / apagado), puede usar estas tres entradas como entradas discretas independientes en lugar de un contador. Luego, hay disponibles voltajes de suministro de sensor de + 12V y + 5V, una salida digital (que se discutirá en un artículo diferente) y una conexión a tierra.
Las entradas son de nivel TTL, lo que significa que su estado bajo debe estar por debajo de 0,8 V y su estado alto debe ser superior a 2 V (hasta 5 V). Veamos un poco más de cerca las especificaciones electrónicas de los contadores SIRIUS:
| Entradas SuperCounter® | / |
|---|---|
| Base de tiempo | 102.4MHz |
| Precisión de la base de tiempo Típica | 5 ppm, Max: 20 ppm |
| Max. Banda ancha | 10MHz |
| Filtro de entrada | 500 ns, 1μs, 2μs, 4μs, 5μs and 7.5μs |
| Compatibilidad de nivel de entrada | TTL (Bajo: <0.8, High > 2V) |
| Impedancia de entrada | 100kΩ pull-up a +3.3V |
| Protección de entrada | ±25Volt continuo |
| Salida de alarma | Coleccionista abierto, max. 100mA/30Volt |
| Suministro de sensor | 5V/100mA;12V/50mA |
Antes de entrar en todos los modos de operación de entrada digital y cómo puede usarlos, debemos revisar un aspecto muy importante de lo que hace que los SuperCounters sean tan especiales, y tiene que ver con cómo alinean con precisión los datos del contador con los datos analógicos y otros.
Alinear los datos del contador con los datos analógicos
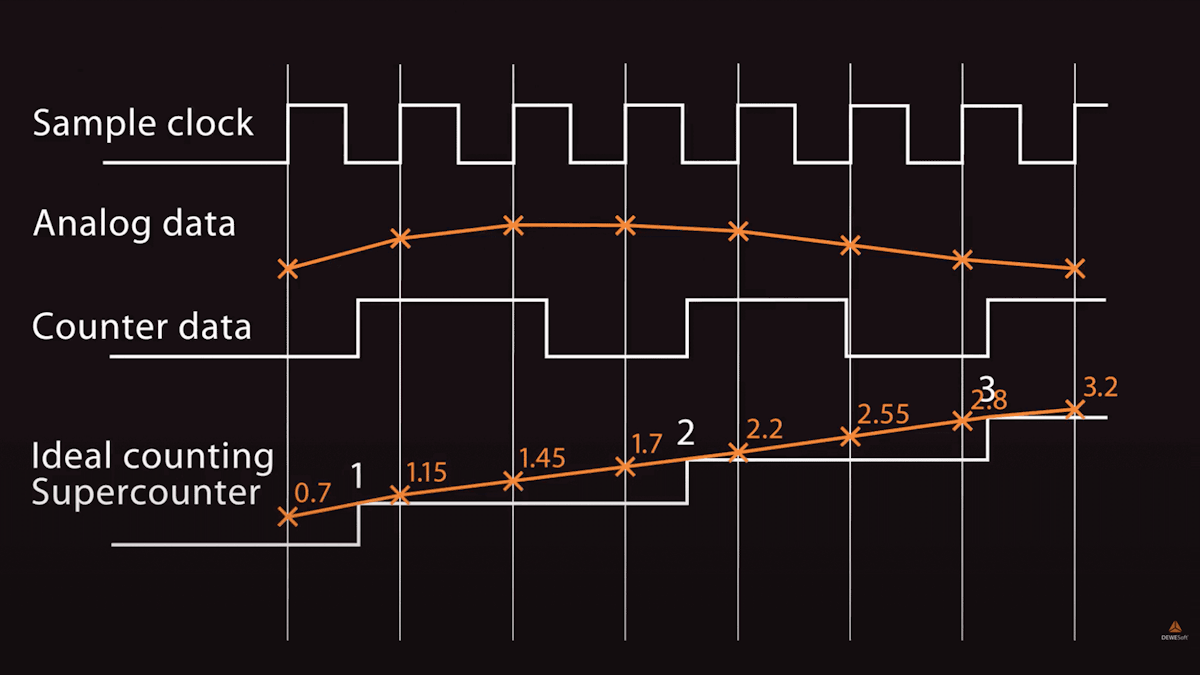
Los contadores estándar disponibles en la mayoría de los sistemas DAQ en la actualidad solo brindan salidas de resolución entera (por ejemplo, 1, 1, 2, 2). Como resultado, sus salidas están siempre una muestra detrás de los datos del sensor analógico. Esto puede ser un problema real en aplicaciones como vibración rotacional o de torsión cuando un cambio de fase de incluso una muestra puede cambiar los resultados.
Los SuperCounters resuelven este problema por completo extrayendo valores de punto flotante como 1.37, 1.87, 2.37 y luego alineándolos con precisión en el tiempo con el resto de sus datos. De hecho, un SuperCounter es realmente dos contadores en uno. La entrada se alimenta en paralelo a ambos contadores y el subcontador mide el tiempo exacto del flanco ascendente de la señal. Así se calcula y alinea perfectamente el valor real del contador con respecto a los valores analógicos.


El siguiente video muestra cómo la tecnología SuperCounter mide las señales del contador completamente sincronizadas con los canales analógicos. Este video incluye una comparación del mundo real entre el modo de conteo normal y el modo SuperCounting.
Otras fuentes de datos, como bus CAN, XCP, video y otras, también se sincronizan con los datos analógicos en todos los sistemas de adquisición de datos Dewesoft.
El otro "secreto" detrás de esta técnica es que los SuperCounters de Dewesoft se ejecutan en una base de tiempo de 102,4 MHz que es independiente y mucho más alta que la frecuencia de muestreo analógica.


La importancia del aislamiento eléctrico
El aislamiento es tan importante en el ámbito digital como en el analógico. El ruido en la parte superior de las líneas digitales se puede confundir fácilmente con eventos reales y, por lo tanto, se puede contabilizar mal. Es por eso que el hardware DAQ de Dewesoft proporciona un aislamiento sólido en todas las entradas de línea digital y de contador.
La importancia del filtrado
En el mundo real, el ruido y los fallos en las salidas del contador no son infrecuentes. El problema es que si las fallas son lo suficientemente altas en amplitud, pueden contarse como pulsos, lo que da como resultado valores incorrectos. Dewesoft SuperCounters proporciona filtrado avanzado en sus entradas que puede utilizar para mitigar este problema, tal como lo hace en el dominio analógico.
En el gráfico a continuación, puede ver que el segundo pulso rojo es realmente un error, pero que es lo suficientemente grande como para que se haya contado como pulso (vea el paso azul directamente debajo de él: la salida del contador de eventos).


En el software de adquisición de datos DewesoftX puede seleccionar filtros de 100 ns a 5 us. Hay un excelente curso de entrenamiento sobre cómo calcular el valor de filtro correcto.
Modos de funcionamiento
Puede hacer mucho con estas entradas digitales SuperCounter. El hardware SuperCounter está estrechamente integrado con el software Dewesoft X DAQ, lo que brinda acceso a una gran selección de capacidades:
Modo de conteo de eventos (básico, cerrado, arriba / abajo, encoder básico
Modo sensor (encoder, tacógrafo, CDM, 60-2, ...)
Modo de sincronización de forma de onda (período, ancho de pulso, ciclo de trabajo)
Echemos un vistazo a estos modos y cómo se aplican a los sensores en las secciones anteriores de este artículo.
Modo de conteo de eventos
En el modo de conteo de eventos, el software Dewesoft X proporciona varias formas de contar los pulsos de un flujo de pulsos entrante, que incluyen:
Conteo básico
Conteo cerrado
Contador ascendente / descendente
Encoder básico
Conteo básico
En el modo de conteo de eventos básico, podemos contar los flancos ascendentes o descendentes de la señal. Solo necesita conectar la señal a una de las entradas del contador y a tierra.


En el software, seleccione la aplicación Contador de eventos y luego el modo Contador de eventos básico. Ahora simplemente dígale al software a qué pin de entrada conectó la señal. Puede elegir que el sistema cuente hacia ARRIBA o ABAJO. Hay una casilla de verificación para restablecer el recuento al inicio de la medición o no.


Conteo cerrado
En el modo de conteo con compuerta, solo contaremos un pulso cuando una señal con compuerta sea alta. Conecta la señal de pulso a la entrada IN0 (y tierra) y conecta una segunda señal a la entrada IN1, para que sirva como señal de puerta.


Tenga en cuenta que hay casillas de verificación INV (invertir) en ambas entradas. Esto es importante para que pueda establecer la polaridad adecuada de sus señales. Por ejemplo, si la señal de la puerta es normalmente alta, pero necesita que sea normalmente baja, puede marcar la casilla INV junto al selector de puerta de señal.


Contaje ascendente / descendente
El modo de conteo progresivo / regresivo es similar al modo de conteo con puerta anterior, excepto que la puerta se usa para controlar si contamos hacia arriba o hacia atrás. Cuando la puerta está alta y ocurre un pulso, contamos ARRIBA, y cuando la puerta está baja y ocurre un pulso, contamos ABAJO.


La configuración es la misma que con el modo de conteo cerrado. Y como siempre, se incluyen los controles de filtrado, reinicio al inicio de la medición e INV.

Recuento de encoder básico
En el modo de conteo de encoder básico, podemos configurar prácticamente cualquier encoder incremental del mercado actual de una manera muy flexible e intuitiva.


Refiriéndose a la captura de pantalla, simplemente seleccione el modo de encoder en la parte superior izquierda de la pantalla de configuración del contador Dewesoft X. Como antes, se deben seleccionar las entradas de Señal A y Señal B en el medio de la pantalla (normalmente están conectadas a IN0 e IN1 respectivamente).
Tenga en cuenta que si desea utilizar la salida Z (posición cero) del encoder, debe marcar la casilla encoder cero cerca de la parte superior derecha de la pantalla. Cuando haga eso, aparecerá un nuevo cuadro de menú desplegable debajo de Señal A y Señal B para que pueda seleccionar la línea de entrada utilizada para la señal cero:
Normalmente, esta será la línea IN2, como se muestra arriba.
¿Qué tipo de salidas le gustaría del encoder?
En la sección inferior, puede seleccionar desde el canal de ángulo si desea CONTAR, REVOLUCIONES o GRADOS. En la captura de pantalla anterior, hemos seleccionado REVS.
También puede ingresar un factor de escala si lo desea. Los valores predeterminados de x y b son 1 y 0, como se muestra arriba. Es un método de escalado lineal básico y = mx + b,
Dónde:
X = el multiplicador de escala (puede ser un valor entero o de punto flotante; 1 = sin multiplicador)
B = el desplazamiento (puede ser positivo o negativo; 0 = sin desplazamiento)
La línea de frecuencia también puede proporcionar recuentos o RPM (revoluciones por minuto), como se muestra en el selector.
Ahora, volvamos a mirar la esquina superior derecha de la pantalla. Tenemos que decirle al software cuántos pulsos están generando por revolución. En nuestra pantalla de ejemplo, es un encoder 360, por lo que emite un pulso cada 1 ° alrededor de una rotación. Debes ingresar la resolución correcta para tu encoder (generalmente está etiquetada directamente en el sensor).
A continuación, puede configurar el modo de encoder. Esto es lo que significan X1, X2 y X4:
Modo X1: en este modo predeterminado, se contarán los flancos ascendentes de la fuente A.
Modo X2: en este modo, el contador contará los bordes ascendente Y descendente de la fuente A, por lo que la resolución se incrementará en un factor de 2. Todo lo demás permanece igual.
Modo X4: en este modo, el contador contará los bordes ascendente Y descendente de la fuente A y se contará la fuente B, por lo que la resolución se incrementará en un factor de 4. Todo lo demás permanece igual.
El propósito de estos modos X2 y X4 es obtener más resolución del encoder, pero debe tener cuidado porque, a menos que el ciclo de trabajo no sea exactamente del 50%, o en el modo X4 si las pistas A y B no están alineadas con precisión, se pueden introducir los errores de medición debido a la “fluctuación” mecánica.
Cabe mencionar que hay encoders con mucha más resolución que 360 pulsos por revolución, por lo que los ingenieros pueden adaptar el sensor a los requisitos de medición de una manera flexible.
Modo sensor
En el modo de sensor, configura el contador para sensores específicos, que incluyen:
encoders
Tacómetros
Sensores CDM
60-2 sensores
Y más
Por supuesto, puede configurar todo esto manualmente utilizando los métodos que se muestran en las secciones anteriores, pero el software Dewesoft X incluye una base de datos de sensores donde puede crear, editar y reutilizar sus sensores específicos, haciendo que la configuración sea rápida y fácil. ¿Por qué empezar de cero cuando usas el mismo encoder o sensor de proximidad que usaste hace unos días? Con unos sencillos pasos, puede agregar cualquier sensor a su base de datos y luego simplemente seleccionarlo por su nombre la próxima vez que lo use, y se configurará en el software tan rápido como pueda parpadear.
Modo de sincronización de forma de onda
En el modo de sincronización de forma de onda, el software DewesoftX DAQ puede proporcionar varias salidas calculadas útiles de cualquier flujo de pulso entrante, que incluyen:
Período
Ancho de pulso
Ciclo de trabajo


Modo de entrada digital discreta
Cada contador tiene tres entradas, por lo que puede usarlas libremente como entradas digitales discretas (en lugar de como un contador). En este caso, no utiliza el módulo contador, sino que configura una o más entradas digitales dentro del software de adquisición de datos DewesoftX.
Y es realmente tan simple como activar una o más de sus entradas digitales en la pantalla de configuración del software.


Prácticamente no hay configuración porque las entradas son 0 o 1, y no son posibles otros valores. Puede configurar el nombre del canal, el color y las unidades de ingeniería (UI), como se muestra en la siguiente captura de pantalla:
Luego, en las pantallas de visualización, simplemente aplique estas entradas digitales a cualquiera de las pantallas visuales que desee. Estos canales se almacenarán junto con los demás datos. Es así de simple.
Para ir más lejos, puede usar estos valores discretos en canales de fórmulas matemáticas, o como entrada a uno o más canales de activación que comenzarán y / o grabarán.
Sistemas DAQ Dewesoft con entradas digitales
Sistemas SIRIUS DAQ
La mayoría de los segmentos SIRIUS DAQ tienen entradas SuperCounter opcionales. Cada segmento SIRIUS consta de 8 canales de entrada analógica, es posible configurarlo con hasta 8 contadores por segmento (depende de los conectores de entrada analógica que se utilicen).


Módulos de entrada estándar SIRIUS
| Módulo | STG | STGM | ACC | CHG | HV | LV |
|---|---|---|---|---|---|---|
| ¿Versión de contador? | √ | √ | √ | √ | X | √ |
Módulos de entrada SIRIUS HS (alta velocidad)
| Módulo | STG | ACC | CHG | HV | LV |
|---|---|---|---|---|---|
| ¿Versión de contador? | √ | √ | √ | X | √ |
Nota: Las secciones SIRIUS-HD no pueden tener entradas SuperCounter debido a limitaciones de espacio.
Para aplicaciones de entrada discreta de gran cantidad, el módulo SIRIUS STGM-DB tiene un conector macho DSUB-37 adicional que proporciona 24 entradas digitales dedicadas. Estas 24 entradas se pueden utilizar alternativamente para 8 sensores de contador / encoder.
Sistema DAQ DEWE-43A
El DEWE-43A es un sistema DAQ portátil de 8 canales que proporciona ocho SuperCounters como estándar. Cada contador es independiente y, alternativamente, se puede utilizar como tres entradas discretas en lugar de como contador. Cada sistema DEWE-43A incluye el software galardonado DewesoftX para la configuración, operación, visualización, almacenamiento, análisis y generación de informes completos del sistema.


Sistemas KRYPTON DAQ
KRYPTON y KRYPTON ONE son módulos DAQ extremadamente resistentes, con clasificación IP67 para operar en entornos hostiles con golpes, vibraciones y temperaturas extremas altas y bajas. Cada sistema KRYPTON DAQ incluye el software galardonado DewesoftX para la configuración, operación, visualización, almacenamiento, análisis y generación de informes completos del sistema.


Módulos digitales resistentes KRYPTON y KRYPTON-1
| Módulo | Entradas de contador | Entradas discretas | Salidas discretas | Tasa de datos de entrada | Tasa de datos de salida |
|---|---|---|---|---|---|
| KRYPTON 4xDI | - | 4 | - | 40 kS/s/ch | N/A |
| KRYPTON-4xDO | - | - | 4 | N/A | Ver nota |
| KRYPTON-1xCNT | 1 | - | - | 10 MHz | 20 kS/s/ch |
| KRYPTONi-16xDI | - | 16 | - | 20 kS/s/ch | N/A |
| KRYPTONi-8xDI-8xDO | - | 8 | 8 | 20 kS/s/ch | Ver nota |
| KRYPTONi-16xDO | - | - | 16 | 20 kS/s/ch | Ver nota |
Nota: Las tasas de salida dependen del maestro EtherCAT seleccionado.
Sistemas IOLITE DAQ
Los sistemas DAQ IOLITE de Dewesoft ofrecen un módulo de entrada digital de 32 canales. Este modelo 32xDI con conexión de terminal de tornillo fácil y fuente de alimentación del sensor es ideal para aplicaciones de control y adquisición de datos de alto número de canales.


IOLITE combina una potente adquisición de datos con control en tiempo real a través de interfaces duales EtherCAT. Disponible en modelo rack de 19 ”y modelo de sobremesa. Hay módulos de entrada y salida digitales disponibles para IOLITE, como se muestra en la siguiente tabla. Cada sistema IOLITE incluye el galardonado software DEWESoft X para la configuración, operación, visualización, almacenamiento, análisis y generación de informes completos del sistema.
Módulos de I/O digitales IOLITE
| Módulo | Entradas discretas | Salidas discretas | Tasa de datos de entrada | Tasa de datos de salida |
|---|---|---|---|---|
| IOLITE-32-DI | 32 | - | 40 kS/s/ch | N/A |
| IOLITE-32-DO | - | 32 | N/A | Ver nota |
Nota: La tasa de salida digital depende del maestro EtherCAT.