




Medindo RPM, ângulo e velocidade usando sensores digitais, codificadores e contadores

May 5, 2020
Neste artigo, discutiremos como você pode medir sinais digitais, bem como codificadores digitais, tacômetros e sensores RPM com os melhores sistemas de aquisição de dados (DAQ) da atualidade, com detalhes suficientes para que você:
Veja como esses sensores funcionam
Aprenda como sensores digitais são sincronizados com dados analógicos
Entenda como você pode usá-los em seus testes
Você está pronto para começar? Vamos lá!
A maioria dos engenheiros entende que os sistemas de aquisição de dados são usados para medir sinais com histórico no tempo, como tensões, temperaturas e correntes, vibrações detectadas por acelerômetros, deformação detectada por sensores de extensômetro da ponte de Wheatstone e muito mais.
Mas frequentemente é necessário medir eventos discretos e sinais de ângulo de rotação que são síncronos com os dados de histórico de tempo mais comuns. Eventos discretos são aqueles eventos que têm apenas dois valores possíveis, por exemplo, interruptores liga / desliga, etc.
Às vezes, são chamados de “sinais digitais”, pois são fundamentalmente compostos de estados de tensão alta-baixa (também conhecida como “ligado / desligado”). Nas seções a seguir, apresentaremos alguns exemplos desses tipos de sinais adicionais e discutiremos como eles são melhor medidos e sincronizados com o restante dos dados.
O que são sinais discretos / sinais digitais?
Vejamos o caso de uma chave de proximidade ou sensor, que emite uma baixa tensão (0 V neste exemplo) quando a unidade em teste (UUT) não está próxima, mas em seguida emite uma tensão mais alta (5 V) quando a UUT está dentro da faixa . Pode ser necessário registrar este estado discreto em sincronia com nosso sistema de medição para colocar os dados analógicos em contexto. Então, como podemos fazer isso?


Uma maneira simples é pegar esses sinais elétricos e inseri-los nas entradas analógicas do sistema de medição. Isso funcionará e ocupa apenas um canal analógico. No entanto, e se precisássemos registrar os estados de oito sensores de proximidade ... ou dez ... ou mais?
Nesse caso, seria um desperdício enorme de nossas entradas analógicas de amplo alcance e relativamente caras usá-las para esses sinais discretos simples. Além disso, às vezes as entradas discretas requerem largura de banda maior do que as entradas analógicas relativamente lentas podem suportar, portanto, novamente, uma entrada analógica pode não ser um bom ajuste, independentemente.
Quando vários sinais discretos precisam ser adquiridos, é mais eficiente e muito mais barato usar uma entrada digital projetada para essa tarefa. No caso dos sistemas Dewesoft DAQ, como a linha de produtos SIRIUS, cada entrada do contador pode lidar com uma variedade de sensores com saídas digitais discretas, como contadores e codificadores, bem como várias entradas digitais discretas.
E como os contadores / codificadores normalmente funcionam a uma taxa muito alta, a base de tempo dessas entradas é bastante alta em 102,4 MHz, o que fornece uma largura de banda de 10 MHz - muito além das entradas analógicas típicas para medição física.
A mais simples das entradas digitais é o tipo de sinal liga / desliga que se parece com uma onda quadrada se você olhar para ela. Às vezes, eles são chamados de "canais discretos" ou "canais de eventos". Como eles têm apenas dois estados, eles são frequentemente usados para mostrar o estado de uma porta aberta ou fechada, ou um circuito sendo ligado ou desligado, ou uma lâmina passando, e mil outras possibilidades sim / não que podemos precisar a medida.
O que é um sinal TTL?
As entradas discretas normalmente saem de um relé ou transdutor em níveis TTL (lógica de transistor para transistor), que são baseados em um pull-up de 5V. Em teoria, o sinal TTL on / off perfeito seria 0 V representando OFF (significando um valor digital de 0) e 5 V representando ON (significando o valor digital de 1). Porém, na prática, é quase impossível alcançar tal precisão, então as faixas aceitáveis tornaram-se 0 a 0,8 V para DESLIGADO e 2 V a 5 V para LIGADO.


Entradas digitais / discretas Dewesoft
As entradas do contador / codificador da Dewesoft fornecem três entradas que podem ser usadas para entradas discretas / digitais. Certos modelos também fornecem linhas DI (entrada digital) dedicadas separadas das entradas do contador.
Para obter detalhes completos, consulte a seção abaixo Dewesoft SuperCounter® Technology.
O que é contador ou codificador?
Os contadores e codificadores estão no negócio de contagem de pulsos. Mas por que? Às vezes, a aplicação realmente é apenas contar, mas muitas vezes é feita para medir o ângulo ou posição angular.
Por exemplo, o volante do seu carro - é importante saber exatamente para que lado o carro está sendo dirigido em tempo real. Portanto, um codificador dentro do volante divide os 360 ° de rotação em milhares de etapas discretas. Ele também é configurado para que a posição morta superior (direção direta) esteja em um valor de posição rotacional conhecido.
Todos os recursos de segurança e prevenção de colisões de hoje, bem como recursos de direção autônoma em carros de passageiros, veículos agrícolas e muito mais, contam com este codificador para saber a posição exata do volante em todos os momentos.
Mas a uma curta distância do nosso volante está um botão giratório no painel, onde você pode alterar o volume do rádio ou mudar para um canal diferente. Este dial é realmente um codificador com uma saída digital que alimenta um microcontrolador que lê a posição do codificador que você selecionou e permite que você percorra as opções possíveis, girando e girando em qualquer direção.
Normalmente, o codificador de volume é definido com uma posição de início e parada, enquanto o codificador de mudança de canal pode girar em torno de todas as estações. Esses são apenas três aplicativos de codificadores que a maioria das pessoas usa todos os dias em seus automóveis.
Aplicativos de contador e codificador
Os sensores de posição e posição angular podem ser encontrados em uma ampla gama de aplicações:
Sensor de posição do volante
Sensor de posição do pedal
Sensor de posição do acelerador
Sensor de torque
Monitoramento e controle da máquina de processo (milhares de aplicações)
Manter referências de posição absoluta em máquinas CNC
Controlar a posição absoluta do paciente em máquinas CNC e MRI
Feedback de posição em robótica de todos os tipos
Sistemas eletrônicos, especialmente para a interface humana
Aplicações de correias transportadoras
Sensores de estacionamento
Um sensor de posição angular mede a posição angular de um eixo. Os sensores de ângulo estão disponíveis em uma variedade de pacotes e resoluções, desde sensores indutivos simples que simplesmente contam cada vez que o eixo gira, até codificadores de alta resolução que fornecem centenas ou mesmo milhares de posições em torno da rotação de 360 ° e também relatam a direção de rotação.
Existem vários tipos de sensores de contador e codificador que são usados na aquisição de dados hoje, incluindo:
| Tipo de Sensor | Descrição |
|---|---|
| Sensores de proximidade | Detecta um objeto chegando a uma distância prescrita do sensor e emite um pulso. Usado para aplicações de contagem, tacômetro e velocidade de rotação |
| Codificadores Rotativos | Sensor de eixo rotativo que emite sinais A, B e Z com até milhares de pulsos de resolução em torno de 360 ° |
| Codificadores Lineares | Mesma tecnologia de um codificador rotativo, exceto que esses codificadores funcionam de forma linear, ou seja, em linha reta |
| Sensores de dente de engrenagem | Sensores com o número definido de pulsos por revolução (geralmente 60), às vezes com dentes ausentes (60-2) para o ângulo ou ponto inicial é conhecido, |
| Sensores Ópticos | Sensor de ângulo óptico sem contato que detecta orifícios em um disco giratório ou listras brancas / pretas na fita fixada em um eixo |
Vamos dar uma olhada em cada um desses tipos de sensores e ver como eles podem ser incorporados aos sistemas DAQ de hoje.
Sensores de proximidade
Um sensor de proximidade é capaz de detectar um objeto próximo sem fazer contato com ele e, em seguida, emitir um pulso ou sinal de tensão. Existem vários tipos de sensores de proximidade, que são escolhidos com base na composição do (s) objeto (s) que devem ser detectados.


Por exemplo, um sensor de proximidade indutivo cria um campo eletromagnético em torno de sua extremidade de medição. De acordo com o conhecido efeito magneto-resistivo, a resistência de certos objetos (particularmente ferrosos) muda quando eles são expostos a campos magnéticos. A maioria dos sensores de proximidade tiram vantagem desse efeito criando um pequeno campo magnético e detectando quando ele é interrompido ou alterado significativamente devido à presença desse material.
Portanto, quando colocamos esse sensor perto de um eixo giratório e, em seguida, fixamos um elemento ferroso no eixo que passará perto do sensor a cada revolução, temos um sensor de velocidade muito confiável e preciso. O sensor detecta a interrupção do campo e emite um pulso ou sinal de tensão que qualquer sistema DAQ pode exibir e registrar.


Existem também sensores de proximidade capacitivos que podem detectar objetos não metálicos, usando o princípio de acoplamento capacitivo. Em vez de um campo eletromagnético, eles geram um campo eletrostático. Conforme um objeto entra neste campo, ele muda a capacitância no circuito oscilador do sensor. Isso é detectado pelo sensor que cria uma saída. No caso de sensores de proximidade magnéticos e capacitivos, sua sensibilidade ao objeto alvo pode ser ajustada.
Nota: Existem também sensores fotoelétricos que emitem luz e detectam quando ela reflete de volta ou não. Mais sobre eles na seção Sensores de fita.
Os sistemas DAQ avançados como os da Dewesoft podem contar esses pulsos e realizar todos os tipos de operações matemáticas neles, incluindo convertê-los para RPM se aplicável, permitir que os valores sejam redefinidos e muito mais.
Aplicações de sensores de proximidade
Contagem de revoluções por minuto (RPM) do eixo rotativo (aplicações de tacômetro)
Contagem de peças que passam pela linha de produção
Detecção de veículos de interseção (presentes na estrada)
Detecção de nível em fábricas de engarrafamento e enlatamento
Detectando a posição de objetos na linha de montagem
Características do sensor de proximidade
Muito confiáveis porque nunca fazem contato com os objetos que estão sendo detectados. O desgaste é virtualmente inexistente
Custo inicial e operacional muito baixo
Tipos capacitivos também podem ser usados para medir a espessura
Os tipos indutivos não são afetados por água, lama, etc.
Consensos do sensor de proximidade
Distâncias de detecção limitadas - a maioria dos sensores indutivos limitada a 70 mm (2,76 pol.)
Eles requerem alimentação externa
Entrada aplicável em DAQs Dewesoft
As entradas do contador / codificador da Dewesoft são perfeitamente adequadas para sensores de proximidade de todos os tipos e podem até fornecer energia para a maioria deles quando necessário. Para obter detalhes completos, consulte a seção abaixo Dewesoft SuperCounter® Technology.
Codificadores Rotativos
Um codificador rotativo, também conhecido como “codificador de eixo” ou “eixo do codificador”, normalmente oferece excelente resolução de ângulo, pois estão disponíveis com até milhares de etapas por rotação de 360 °, o que permite etapas muito menores que 1 °. Muitos codificadores também podem detectar a direção da rotação, o que é essencial em algumas aplicações.


Codificadores rotativos incrementais
Os codificadores incrementais relatam mudanças relativas na posição e direção - eles não rastreiam a posição absoluta (ângulo). Os encoders incrementais emitem sinais A e B, que indicam mudanças no movimento e na direção. Alguns deles são capazes de ser “homed” ou referenciados a uma posição particular. Quando esta posição é alcançada, um sinal de saída Z adicional é gerado. Os codificadores incrementais são os tipos de codificadores mais comuns e populares.
Eles usam um codificador de quadratura para gerar suas saídas A e B. Com este método, a diferença de fase entre as saídas A e B é normalmente definida como + 90 ° quando o sentido de rotação é no sentido horário e -90 ° quando o sentido de rotação é no sentido anti-horário. O esquema de fases baseado em 90 graus entre as saídas A e B é conhecido como "quadratura".


Quando o eixo não está girando, as saídas do codificador A e B são zero.
Quando o eixo está girando, a frequência de saída do codificador representa diretamente a velocidade do eixo com fidelidade muito alta. A resolução do codificador é definida por quantas divisões os 360 ° de uma rotação do eixo são divididos. Com codificadores incrementais, isso pode ser de algumas centenas de passos a 10.000 passos em torno de uma rotação.
Os codificadores incrementais geram mudanças no movimento e na direção com latência muito baixa, tornando-os ideais para aplicações de velocidade muito alta que os codificadores absolutos não suportam.
Pulsos por revolução, também conhecido como PPR, é uma característica definidora dos codificadores incrementais. Isso define quantos pulsos por rotação de 360 ° do eixo ele produzirá. Quanto maior for o PPR, maior será a resolução do codificador.
É importante que a entrada do contador à qual você conecta um codificador incremental tenha uma largura de banda alta o suficiente para lidar com a saída máxima possível. Digamos que estejamos usando um codificador 360 PPR, que emite 1 pulso por revolução. Se este codificador girar a 600 RPM, ele estará gerando:
Não há nada para se preocupar com as entradas do contador Dewesoft, já que elas são baseadas em um clock interno de 102,4 MHz e podem lidar facilmente com praticamente qualquer codificador no mercado hoje. Para obter mais informações, consulte a seção abaixo Dewesoft SuperCounter® Technology.
Codificadores Absolutos
Como o nome indica, os encoders absolutos emitem a posição atual absoluta do eixo, tornando-os ideais para medições baseadas em ângulos. Eles estão disponíveis nas versões mecânica, óptica e magnética.


Enquanto os codificadores incrementais geram um fluxo de pulsos, os codificadores absolutos geram valores exclusivos para cada posição ao redor do eixo. Outra distinção é que enquanto os encoders incrementais simplesmente emitem seus pulsos A, B e Z quando o eixo gira, os encoders absolutos devem ser interrogados pelo sistema de medição. Em seguida, eles geram um conjunto de dados de vários bits exclusiva que indica a posição exata do eixo. Este conjunto é um valor único e não precisa ser decodificada por si só.
Embora não sejam tão “rápidos” quanto os codificadores lineares, os codificadores absolutos fornecem uma resolução posicional mais alta do que os codificadores incrementais. Observe que, como esses sensores não têm saídas de pulso, eles não podem ser usados com as entradas do Dewesoft SuperCounter. Eles exigem uma interface digital que possa ler as leituras multibit. As interfaces comuns disponíveis para codificadores absolutos incluem serial, Fieldbus e ethernet.
Aplicações de codificador rotativo incremental
Produtos de consumo - posição do trackball, controles de sistemas de entretenimento
Manuseio de Materiais - Medição de velocidade de motores, transportadores, sistemas de enchimento
Fabricação de PCB - escolha e coloque sistemas de medição de posição
Têxteis, metais, celulose e papel - velocidade da máquina, medidas de posição e distância
Aeroespacial - feedback da posição do atuador e posicionamento da antena
Profissionais de codificador rotativo incremental
Alta velocidade e baixa latência
Alta resolução (até milhares de valores discretos em torno de uma rotação de 360°)
Saída de posição Z "inicial" disponível
Altamente confiável e preciso
Contras do codificador rotativo incremental
Interferência RF e EM possível com codificadores magnéticos
Possível interferência de luz com codificadores ópticos
Pode ser contaminado por ambientes agressivos
Entrada de Dewesoft aplicável
As entradas de contador / codificador da Dewesoft são perfeitamente adequadas para codificadores incrementais de todos os tipos e suportam uma ampla gama de modos de operação, incluindo X1, X2 e X4. Para obter detalhes completos, consulte a seção abaixo Dewesoft SuperCounter® Technology.
Codificadores Lineares
Um codificador linear mede a posição ao longo de um caminho linear. Ao contrário de um codificador rotativo que possui uma placa circular interna que permite medir a posição do eixo, a maioria dos codificadores lineares se move ao longo de uma escala externa e determina sua posição a partir de marcações na escala.


Um exemplo perfeito é uma impressora jato de tinta, que usa um codificador linear para mover com precisão a cabeça de impressão para frente e para trás ao longo da largura do papel durante a impressão. Obviamente, alta resolução e precisão são necessárias nesta e em inúmeras outras aplicações.
A tecnologia de detecção mais prevalente usada com codificadores lineares é óptica, no entanto, existem codificadores que também empregam tecnologia magnética, capacitiva e indutiva. Os codificadores ópticos fornecem a maior precisão e a maior resolução possível, no entanto, deve-se tomar cuidado para evitar que contaminantes interfiram em sua operação bloqueando sua "visão"
Existem codificadores lineares de saída analógica e digital. Os sistemas de aquisição de dados Dewesoft são mais adequados para saídas digitais, uma vez que fornecem saídas A e B muito semelhantes aos codificadores rotativos incrementais, conforme descrito na seção anterior.
Aplicativos de codificador linear
Maquinas CNC
Impressoras jato de tinta
Scanners a laser
Sistemas de montagem pick-and-place
Robótica
Prós do codificador linear
Muito confiáveis porque nunca fazem contato com os objetos que estão sendo detectados. O desgaste é virtualmente inexistente
Custo inicial e operacional muito baixo
Tipos capacitivos também podem ser usados para medir a espessura
Os tipos indutivos não são afetados por água, lama, etc.
Contras do codificador linear
Distâncias de detecção limitadas - a maioria dos sensores indutivos limitada a 70 mm (2,76 pol.)
Eles requerem alimentação externa
Entrada de Dewesoft aplicável
As entradas de contador / codificador de Dewesoft são perfeitamente adequadas para codificadores lineares incrementais digitais. Para obter detalhes completos, consulte a seção abaixo Dewesoft SuperCounter® Technology.
Sensores de dente de engrenagem
Este sensor baseado em ângulo é composto por uma engrenagem com dentes ao redor de sua circunferência que são montados no eixo do motor, além de um sensor de proximidade de algum tipo posicionado de forma que quando os dentes da engrenagem passarem, eles sejam detectados. Isso oferece mais resolução do que um sensor de proximidade que detecta apenas um recurso por revolução de um eixo, mas não tanta resolução quanto um codificador rotativo, que pode ter milhares de “dentes” em uma revolução.
Este sensor de proximidade é tipicamente um tipo de efeito Hall, mas outros são possíveis. Sensores de dente de engrenagem são ideais para medir a velocidade de um motor ou velocidade do motor. Esse sensor é análogo a um medidor de tacômetro.

O sensor de proximidade de efeito Hall detecta a variação no fluxo encontrada no entreferro entre um ímã e os dentes da engrenagem ferrosa que passam. Em sistemas DAQ modernos, o sinal é convertido em uma onda quadrada binária que é imune aos requisitos de orientação e pode acompanhar a velocidade da engrenagem até uma parada total ... e detectar o primeiro dente da engrenagem que passa imediatamente após a energização.
Observe que a maioria dos sensores de efeito Hall podem detectar não apenas dentes de engrenagem passando, mas também podem ser usados para detectar furos em discos e placas, recursos ferrosos (por exemplo, parafusos) adicionados a uma ampla variedade de discos e placas e entalhes em eixos de transmissão árvores de cames.


Um sensor de dente de engrenagem simples típico tem 60 dentes de engrenagem em torno de sua circunferência, onde cada dente representa 6 ° da rotação de 360 ° do eixo. Consequentemente, o sensor só pode emitir uma onda quadrada positiva quando cada dente passa. A partir dessa contagem e do trem de pulso correspondente, um bom sistema DAQ pode derivar o RPM.
Mas não podemos saber o ponto morto superior, ou qualquer outra referência absoluta, porque não há referência fornecida por esta configuração de dente de engrenagem. Em outras palavras, não podemos saber qual dos 60 dentes nosso sensor está detectando, então não há como saber a posição do eixo.
Portanto, enquanto em aplicações onde é necessário saber o ângulo do próprio eixo, precisamos usar um dente de engrenagem com dentes faltando.
Engrenagem de dente com dentes faltando
Uma prática comum é usar um sensor de dente de engrenagem onde 2 dos 60 dentes estão faltando. A lacuna é usada para relatar o ponto morto superior ou a posição inicial do eixo. O conhecimento do ponto de partida ou do ponto morto superior é essencial em algumas aplicações. Eles são comumente chamados de “sensores 60-2”.


Os dentes “ausentes” são usados como identificação para que o sensor possa reconhecer a posição angular exata do virabrequim. Os dois dentes que faltam podem ser posicionados no eixo em qualquer ângulo desejado, por exemplo, no ponto morto superior.

Observe que também existem sensores de dente de engrenagem de quadratura disponíveis que emitem sinais A e B defasados em 90 ° entre si. Esses tipos também fornecem a direção de rotação em sistemas onde o eixo pode girar tanto no sentido horário quanto no anti-horário.
Aplicações de sensor de dente de engrenagem
Medindo RPM de eixos rotativos
Análise de combustão do motor
Estudos de vibração de torção e rotação
Características do sensor de dente da engrenagem
Normalmente muito robusto e difícil de quebrar
Custo inicial e operacional muito baixo
Contras do sensor de dente da engrenagem
Em alguns sistemas, pode ser difícil instalar a engrenagem
Distâncias de detecção limitadas - a maioria dos sensores indutivos limitada a 70 mm (2,76 pol.)
Resolução de ângulo limitada em comparação com codificadores, que podem fornecer centenas e até milhares de etapas em torno da rotação de 360 ° do eixo.
Entrada de Dewesoft aplicável
As entradas do contador / codificador da Dewesoft são perfeitamente adequadas para configurações de sensor de dente de engrenagem com virtualmente qualquer número de dentes, com ou sem dentes ausentes, bem como configurações de sensor de dente de engrenagem de quadratura. Para obter detalhes completos, consulte a seção abaixo Dewesoft SuperCounter® Technology.
Sensores Ópticos
Os sensores ópticos consistem em um disco com orifícios ou marcações pretas / brancas em torno de sua circunferência ou fita que é montada no eixo rotativo. Um sensor óptico infravermelho é montado próximo às marcações. Ele emite um pulso cada vez que um buraco ou marca preta passa. Esses discos estão disponíveis em várias resoluções. Um disco com 360 marcações teria resolução de 1 °, por exemplo.


Existem também sensores de fita ótica, que consistem em um sensor ótico e uma fita adesiva com listras pretas e brancas impressas. A fita listrada é enrolada em uma haste de listra, com o sensor óptico apontado para ela. O sensor reflete a luz da fita e pode detectar cada marca preta e convertê-la em um pulso de saída.
Existem também tacômetros ópticos, que projetam luz visível em uma roda ou eixo giratório e usam os reflexos para contar recursos no eixo ou roda para calcular o RPM. A maioria deles são dispositivos portáteis que fornecem uma leitura em uma tela, mas que não possuem uma saída elétrica que possamos registrar.


Quer seja uma configuração de sensor óptico baseado em disco ou fita, o resultado é efetivamente o mesmo - obtemos uma saída de pulso que podemos inserir em nosso sistema DAQ. A Dewesoft oferece um sensor de fita chamado DS-TACHO-4. Ele tem uma largura de banda de 100 kHz e um limite de detecção ajustável conveniente.


Quando você enrola a fita em torno de um eixo, haverá um ponto de transição. É possível adicionar fita preta a este ponto para criar uma faixa preta tripla. O sensor óptico pode usar isso como um ponto de referência, portanto, temos um ângulo ou posição conhecida.


Aplicações de sensores ópticos
Contando RPM de um eixo giratório
Motor ou medições de desempenho do motor
Monitoramento da velocidade do motor
Análise de combustão
Medições de vibração de torção
Medições de vibração rotacional
Profissionais de sensores ópticos
Muito confiáveis porque nunca fazem contato com os objetos que estão sendo detectados. O desgaste é virtualmente inexistente
Pode detectar o ponto de referência (faixa preta dupla ou tripla)
Consensos do sensor óptico
Distâncias de detecção limitadas (sensores de fita normalmente 2 ~ 5 mm)
As marcas brancas / pretas na fita podem ficar sujas em alguns ambientes, interferindo em suas leituras
Líquidos podem interferir na operação do sensor óptico
Energia externa necessária
Entrada de Dewesoft aplicável
As entradas do contador / codificador da Dewesoft são perfeitamente adequadas para sensores ópticos de todos os tipos. Para obter detalhes completos, consulte a seção abaixo Dewesoft SuperCounter® Technology.
Contadores digitais
O que é um contador digital?
Um contador eletrônico é um circuito de entrada digital que conta o número de pulsos que são recebidos de sensores de proximidade, codificadores e dispositivos semelhantes. O tipo mais simples de contadores digitais rastreia e conta o tempo e os pulsos. Muito parecido com um cronômetro, eles podem ser zerados e podem contar até um determinado valor.


Os contadores simples fornecidos pela maioria dos fabricantes geralmente oferecem ampla capacidade quando usados por eles próprios, mas quando fazem parte de um sistema de aquisição de dados que mede simultaneamente dados analógicos e talvez até entradas adicionais, como dados de barramento CAN, dados PMC, quadros de vídeo, etc. eles raramente fornecem sincronização em tempo real em todas essas entradas. É aqui que entra a tecnologia SuperCounter da Dewesoft.
Tecnologia Dewesoft SuperCounter®
Dewesoft SuperCounter® é compatível com uma ampla gama de codificadores, sensores de dente de engrenagem, sensores de proximidade, etc. Os sistemas Dewesoft como SIRIUS, DEWE-43A, MINITAURs, KRYPTON, etc. podem ser configurados com uma ou mais entradas SuperCounter. Eles geralmente são fornecidos em um conector LEMO de travamento robusto, mas existem outras possibilidades de conector em alguns modelos.


Normalmente existem três entradas, porque os codificadores exigem isso, como descreveremos na seção do codificador a seguir. Se você deseja medir entradas discretas (sinais TTL on / off), você pode usar essas três entradas como entradas discretas independentes em vez de um contador. Então, há tensões de alimentação do sensor de + 12 V e + 5 V disponíveis, uma saída digital (a ser discutida em um artigo diferente) e uma conexão de aterramento.
As entradas são de nível TTL, o que significa que seu estado baixo deve ser inferior a 0,8 V, e seu estado alto deve ser superior a 2 V (até 5 V). Vejamos um pouco mais de perto as especificações eletrônicas dos contadores SIRIUS:
| Entradas SuperCounter® | / |
|---|---|
| Base de tempo | 102.4MHz |
| Precisão da base de tempo típica | 5 ppm, Max: 20 ppm |
| Máx. Largura de banda | 10MHz |
| Filtro de entrada | 500 ns, 1μs, 2μs, 4μs, 5μs and 7.5μs |
| Compatibilidade de nível de entrada | TTL (Baixo: <0.8, High > 2V) |
| Impedância de entrada | 100kΩ puxar para cima +3.3V |
| Proteção de entrada | ±25Volt contínuo |
| Saída de alarme | Coletor aberto, máx. 100mA/30Volt |
| Suprimento de sensor | 5V/100mA;12V/50mA |
Antes de entrarmos em todos os modos de operação de entrada digital e como você pode usá-los, devemos revisar um aspecto muito importante do que torna os SuperCounters tão especiais - e tem a ver com como eles alinham precisamente os dados do contador com os dados analógicos e outros .
Alinhando dados do contador com dados analógicos
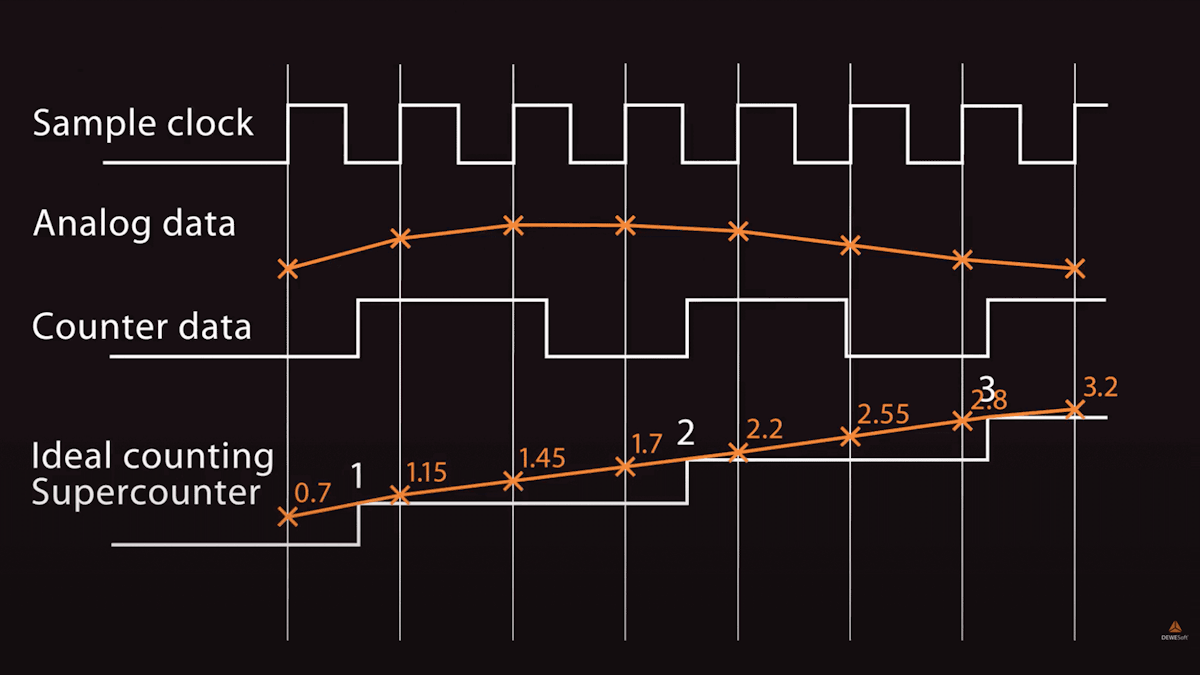
Os contadores padrão disponíveis na maioria dos sistemas DAQ hoje fornecem apenas saídas de resolução inteira (por exemplo, 1, 1, 2, 2). Como resultado, suas saídas são sempre uma amostra atrás dos dados do sensor analógico. Isso pode ser um problema real em aplicações como vibração rotacional ou torcional, quando uma mudança de fase de até mesmo uma amostra pode alterar os resultados.
Os SuperCounters resolvem esse problema completamente extraindo valores de ponto flutuante como 1,37, 1,87, 2,37 e, em seguida, alinhando-os precisamente no tempo com o restante dos seus dados. Na verdade, um SuperContador é, na verdade, dois contadores em um. A entrada é alimentada em paralelo em ambos os contadores, e o contador secundário mede o tempo exato da borda de subida do sinal. Assim, o valor real do contador em relação aos valores analógicos é calculado e perfeitamente alinhado

 estão alinhados devido à interpolação entre os valores")
O vídeo abaixo mostra como a tecnologia SuperCounter mede os sinais do contador totalmente sincronizados com os canais analógicos. Este vídeo inclui uma comparação do mundo real entre o modo de contagem normal e o modo SuperCounting.
Outras fontes de dados, como CAN bus, XCP, vídeo e outros, também são sincronizadas com os dados analógicos em todos os sistemas de aquisição de dados Dewesoft.
O outro "segredo" por trás dessa técnica é que os SuperCounters de Dewesoft funcionam em uma base de tempo de 102,4 MHz que é independente e muito mais alta do que a taxa de amostragem analógica.


A importância do isolamento elétrico
O isolamento é tão importante no reino digital quanto é no reino analógico. O ruído em cima de linhas digitais pode ser facilmente confundido com eventos reais e, portanto, mal contabilizado. É por isso que o hardware Dewesoft DAQ fornece isolamento robusto em todas as entradas digitais e de linha de contador.
A importância da filtragem
No mundo real, ruído e falhas nas saídas do contador não são incomuns. O problema é que se os glitches forem altos o suficiente em amplitude, eles podem ser contados como pulsos, resultando em valores errados. Os SuperCounters Dewesoft fornecem filtragem avançada em suas entradas que você pode usar para mitigar esse problema, assim como você faz no domínio analógico.
No gráfico abaixo, você pode ver que o segundo pulso vermelho é realmente um glitch, mas que é grande o suficiente para ser contado como um pulso (veja a etapa azul diretamente abaixo dele - a saída do contador de eventos).


No software de aquisição de dados DewesoftX, você pode selecionar filtros de 100 ns a 5 us. Há um excelente curso de treinamento sobre como calcular o valor correto do filtro.
Modos de operação
Você pode fazer muito com essas entradas digitais SuperCounter. O hardware SuperCounter está totalmente integrado ao software Dewesoft X DAQ, fornecendo acesso a uma grande seleção de recursos:
Modo de contagem de eventos (básico, fechado, para cima / para baixo, codificador básico)
Modo de sensor (codificador, tacômetro, CDM, 60-2, ...)
Modo de temporização da forma de onda (período, largura de pulso, ciclo de serviço)
Vamos dar uma olhada nesses modos e como eles se aplicam aos sensores nas seções anteriores deste artigo.
Modo de contagem de eventos
No modo de contagem de eventos, o software Dewesoft X fornece várias maneiras de contar os pulsos de um fluxo de pulso de entrada, incluindo:
Contagem Básica
Contagem bloqueada
Contador para cima / para baixo
Codificador Básico
Contagem Básica
No modo de contagem de eventos básicos, podemos contar as bordas descendentes ou crescentes do sinal. Você só precisa conectar o sinal a uma das entradas do contador e aterrar.


No software, selecione o aplicativo Contagem de eventos e, em seguida, o modo Contagem de eventos básicos. Agora, deixe o software saber a qual pino de entrada você conectou o sinal. Você pode optar por fazer a contagem do sistema PARA CIMA ou PARA BAIXO. Há uma caixa de seleção para redefinir a contagem no início da medição ou não.


Contagem bloqueada
No modo de contagem de portas, contaremos apenas um pulso quando o sinal de portas estiver alto. Você conecta o próprio sinal de pulso à entrada IN0 (e aterramento) e conecta um segundo sinal à entrada IN1, para servir como o sinal do portão.


Observe que há caixas de seleção INV (inverter) em ambas as entradas. Isso é importante para que você possa definir a polaridade adequada de seus sinais. Por exemplo, se o sinal da porta é normalmente alto, mas você precisa que seja normalmente baixo, você pode marcar a caixa INV ao lado do seletor da porta de sinal.


Contagem crescente / decrescente
O modo de contagem crescente / decrescente é semelhante ao modo de contagem com passagem acima, exceto que a porta é usada para controlar se contamos para cima ou para baixo. Quando a porta está alta e ocorre um pulso, contamos PARA CIMA, e quando a porta está baixa e ocorre um pulso, contamos PARA BAIXO.


A configuração é a mesma do modo de contagem controlada. E como sempre, a filtragem, redefinir no início da medição e controles INV estão incluídos.

Contagem Básica do Codificador
No modo de contagem de codificador básico, podemos configurar praticamente qualquer codificador incremental no mercado hoje de uma forma muito flexível e intuitiva.


Consultando a captura de tela, basta selecionar o modo do codificador no canto superior esquerdo da tela de configuração do contador do DewesoftX. Como antes, as entradas de Sinal A e Sinal B no meio da tela devem ser selecionadas (normalmente elas são conectadas a IN0 e IN1 respectivamente).
Observe que se você deseja usar a saída Z (posição zero) do codificador, é necessário marcar a caixa Codificador Zero próximo ao canto superior direito da tela. Quando você fizer isso, uma nova caixa de menu da caixa de depósito aparecerá abaixo do Sinal A e do Sinal B para que você possa selecionar a linha de entrada usada para o sinal zero:
Normalmente, esta será a linha IN2, conforme mostrado acima.
Que tipo de saída você gostaria do codificador? Que tipo de saída você gostaria do codificador?
Na seção inferior, você pode selecionar a partir do canal de ângulo se deseja CONTAS, REVOLUÇÕES ou GRAUS. Na imagem acima, selecionamos REVS.
Você também pode inserir um fator de escala, se desejar. Os valores padrão de xeb são 1 e 0, conforme mostrado acima. É um método de escala linear básico y = mx + b,
Onde:
X = o multiplicador de escala (pode ser um valor de ponto flutuante ou inteiro; 1 = sem multiplicador)
B = o deslocamento (pode ser positivo ou negativo; 0 = sem deslocamento)
A linha de frequência também pode fornecer contagens ou RPM (revoluções por minuto), conforme mostrado no seletor.
Agora, vamos olhar novamente para o canto superior direito da tela. Precisamos informar ao software quantos pulsos por revolução estão sendo emitidos. Em nossa tela de exemplo, é um codificador 360, portanto, está emitindo um pulso a cada 1 ° em torno de uma rotação. Você deve inserir a resolução correta para o seu codificador (geralmente é rotulado à direita no sensor).
Em seguida, você pode definir o modo do codificador. Aqui está o que significam X1, X2 e X4:
Modo X1 - Neste modo padrão, as bordas crescentes da fonte A serão contadas.
Modo X2 - Neste modo, o contador contará as bordas ascendentes E descendentes da fonte A, de modo que a resolução será aumentada por um fator de 2. Todo o resto permanece o mesmo.
Modo X4 - Neste modo, o contador contará as bordas crescentes E decrescentes da fonte A E a fonte B será contada, de modo que a resolução será aumentada por um fator de 4. Todo o resto permanece o mesmo.
O objetivo desses modos X2 e X4 é obter mais resolução do codificador, mas você deve tomar cuidado porque, a menos que o ciclo de trabalho não seja exatamente 50%, ou no modo X4 se as trilhas A e B não estiverem precisamente alinhadas, erros de medição devido ao “jitter” mecânico pode ser introduzido.
Deve ser mencionado que existem codificadores com muito mais resolução do que 360 pulsos por revolução, então os engenheiros podem combinar o sensor com os requisitos de medição de uma forma flexível.
Modo Sensor
No modo de sensor, você configura o contador para sensores específicos, incluindo:
Codificadores
Tacômetros
Sensores CDM
60-2 sensores
E mais
And more
Claro, você pode configurar tudo isso manualmente usando os métodos mostrados nas seções anteriores, mas o software Dewesoft X inclui um banco de dados de sensores onde você pode criar, editar e reutilizar seus sensores específicos, tornando a configuração rápida e fácil. Por que começar do zero ao usar o mesmo codificador ou sensor de proximidade que você usou há alguns dias? Com alguns passos simples, você pode adicionar qualquer sensor ao seu banco de dados e, em seguida, simplesmente selecioná-lo pelo nome na próxima vez que usá-lo, e ele será configurado no software o mais rápido possível.
Modo de sincronização da forma de onda
No modo de tempo de forma de onda, o software DewesoftX DAQ pode fornecer várias saídas calculadas úteis de qualquer fluxo de pulso de entrada, incluindo:
Período
Largura do pulso
Ciclo de Trabalho


Modo de entrada digital discreta
Cada contador tem três entradas - portanto, você pode usá-las livremente como entradas digitais discretas (em vez de um contador). Neste caso, você não usa o módulo contador, mas configura uma ou mais entradas digitais no software de aquisição de dados DewesoftX.
E é realmente tão simples quanto ativar uma ou mais de suas entradas digitais na tela de configuração do software.


Praticamente não há configuração porque as entradas são 0 ou 1 e nenhum outro valor é possível. Você pode definir o nome do canal, a cor e as unidades de engenharia (EU), conforme mostrado na seguinte captura de tela:
Em seguida, nas telas de exibição, basta aplicar essas entradas digitais a qualquer uma das exibições visuais que você deseja. Esses canais serão armazenados junto com os outros dados. É simples assim.
Para ir mais longe, você pode usar esses valores discretos em canais de fórmulas matemáticas ou como entrada para um ou mais canais de disparo que iniciarão e / ou gravarão.
Sistemas Dewesoft DAQ com entradas digitais
Sistemas SIRIUS DAQ
A maioria dos modulos SIRIUS DAQ tem entradas SuperCounter opcionais. Cada slice SIRIUS consiste em 8 canais de entrada analógica, é possível configurá-lo com até 8 contadores por slice (depende de quais conectores de entrada analógica são usados).


Módulos de entrada padrão SIRIUS
| Módulo | STG | ACC | CHG | HV | LV |
|---|---|---|---|---|---|
| Versão do contador? | √ | √ | √ | X | √ |
Nota:
Para aplicações de entrada discreta de grande quantidade, o módulo SIRIUS STGM-DB tem um conector macho DSUB-37 adicional que fornece 24 entradas digitais dedicadas. Essas 24 entradas podem ser usadas alternativamente para 8 sensores de contador / codificador.
Sistema DEWE-43A DAQ
O DEWE-43A é um sistema DAQ portátil de 8 canais que fornece oito SuperCounters como padrão. Cada contador é independente e pode, alternativamente, ser usado como três entradas discretas em vez de um contador. Cada sistema DEWE-43A inclui o software DewesoftX premiado para configuração completa do sistema, operação, exibição, armazenamento, análise e geração de relatórios.


Sistemas KRYPTON DAQ
KRYPTON e KRYPTON ONE são módulos DAQ extremamente robustos, com classificação IP67 para operação em ambientes adversos com choque, vibração e temperaturas extremas de alta e baixa. Cada sistema KRYPTON DAQ inclui o software DewesoftX premiado para configuração completa do sistema, operação, exibição, armazenamento, análise e geração de relatórios.


Módulos digitais robustos KRYPTON e KRYPTON-1
| Módulo | Entradas de contador | Entradas Discretas | Saídas Discretas | Taxa de dados de entrada | Taxa de dados de saída |
|---|---|---|---|---|---|
| KRYPTON 4xDI | - | 4 | - | 40 kS/s/ch | N/A |
| KRYPTON-4xDO | - | - | 4 | N/A | Veja a nota |
| KRYPTON-1xCNT | 1 | - | - | 10 MHz | 20 kS/s/ch |
| KRYPTONi-16xDI | - | 16 | - | 20 kS/s/ch | N/A |
| KRYPTONi-8xDI-8xDO | - | 8 | 8 | 20 kS/s/ch | Veja a nota |
| KRYPTONi-16xDO | - | - | 16 | 20 kS/s/ch | Veja a nota |
Nota: As taxas de saída dependem do mestre EtherCAT selecionado.
Sistemas IOLITE DAQ
Os sistemas Dewesoft IOLITE DAQ oferecem um módulo de entrada digital de 32 canais. Este modelo 32xDI com fácil conexão de terminal de parafuso e fonte de alimentação do sensor é ideal para aquisição de dados de alta contagem de canais e aplicações de controle.


IOLITE combina aquisição de dados poderosa com controle em tempo real via interfaces EtherCAT duplas. Disponível em um modelo de rack de 19 ”, bem como um modelo de bancada. Existem módulos de entrada e saída digital disponíveis para IOLITE, conforme mostrado na tabela abaixo. Cada sistema IOLITE inclui o software DEWESoftX premiado para configuração completa do sistema, operação, exibição, armazenamento, análise e geração de relatórios.
Módulos de I / O Digital IOLITE
| Módulo | Entradas Discretas | Saídas Discretas | Taxa de dados de entrada | Taxa de dados de saída |
|---|---|---|---|---|
| IOLITE-32-DI | 32 | - | 40 kS/s/ch | N/A |
| IOLITE-32-DO | - | 32 | N/A | Veja a nota |
Nota: A taxa de saída da saída digital depende do mestre EtherCAT.