




Determinación del par de bloqueo de un motor BLDC
Martin Võip
Tallinn University of Technology
September 4, 2025
A medida que los patinetes eléctricos siguen marcando el futuro de la movilidad urbana, comprender el comportamiento par-velocidad de sus motores BLDC es crucial. Mediante herramientas de análisis en tiempo real, los ingenieros pueden mapear la eficiencia e identificar las limitaciones del motor que son críticas para optimizar el diseño y las estrategias de control. Un banco de pruebas personalizado impulsado por Dewesoft puede evaluar el par de bloqueo (stall) y la potencia de salida bajo cargas variables.
La movilidad eléctrica transforma rápidamente el transporte urbano, con los patinetes eléctricos convirtiéndose en un elemento clave. Comprender el rendimiento dinámico y la eficiencia de los motores de corriente continua sin escobillas (BLDC) utilizados en estos patinetes es esencial para ingenieros y estudiantes.
La Universidad Tecnológica de Tallin (TalTech) es una universidad basada en la investigación que se especializa en ingeniería, negocios, administración pública y asuntos marítimos. La universidad tiene casi 10.000 estudiantes matriculados, aproximadamente el 11% de los cuales provienen de más de 100 países diferentes en todo el mundo.
Un motor de corriente continua sin escobillas (BLDC) es un motor eléctrico que funciona con electricidad de corriente continua (DC) pero sin las escobillas mecánicas y el conmutador que se encuentran en los motores tradicionales con escobillas. En lugar de usar escobillas para cambiar la dirección de la corriente en los devanados del motor, un motor BLDC utiliza un controlador electrónico.
El rotor suele contener imanes permanentes, mientras que el estator tiene bobinados. La ausencia de escobillas reduce la fricción, el desgaste y las necesidades de mantenimiento, haciendo que los motores BLDC sean más eficientes, de mayor duración y más silenciosos.
Los motores BLDC son populares en dispositivos modernos debido a su alta eficiencia, control preciso y diseño compacto.
Los motores BLDC se utilizan en diversas aplicaciones:
Vehículos eléctricos
Patinetes eléctricos
Drones
Electrónica de consumo (por ejemplo, ventiladores de refrigeración para ordenadores)
Automatización industrial
Sistemas HVAC
etc.
Para esta aplicación, utilicé un banco de pruebas construido a medida. La configuración demuestra cómo las herramientas Dewesoft pueden caracterizar el comportamiento velocidad del motor y par-velocidad. También puede observar las formas de onda del controlador en tiempo real y construir mapas de eficiencia de motores eléctricos bajo carga.


Los fabricantes utilizan ampliamente motores BLDC en vehículos eléctricos personales debido a su alta eficiencia, bajo mantenimiento y tamaño compacto. Sin embargo, para optimizar su aplicación en condiciones del mundo real, como pendientes pronunciadas o cargas elevadas, es necesario comprender sus características par-velocidad y su eficiencia bajo diferentes condiciones de funcionamiento.
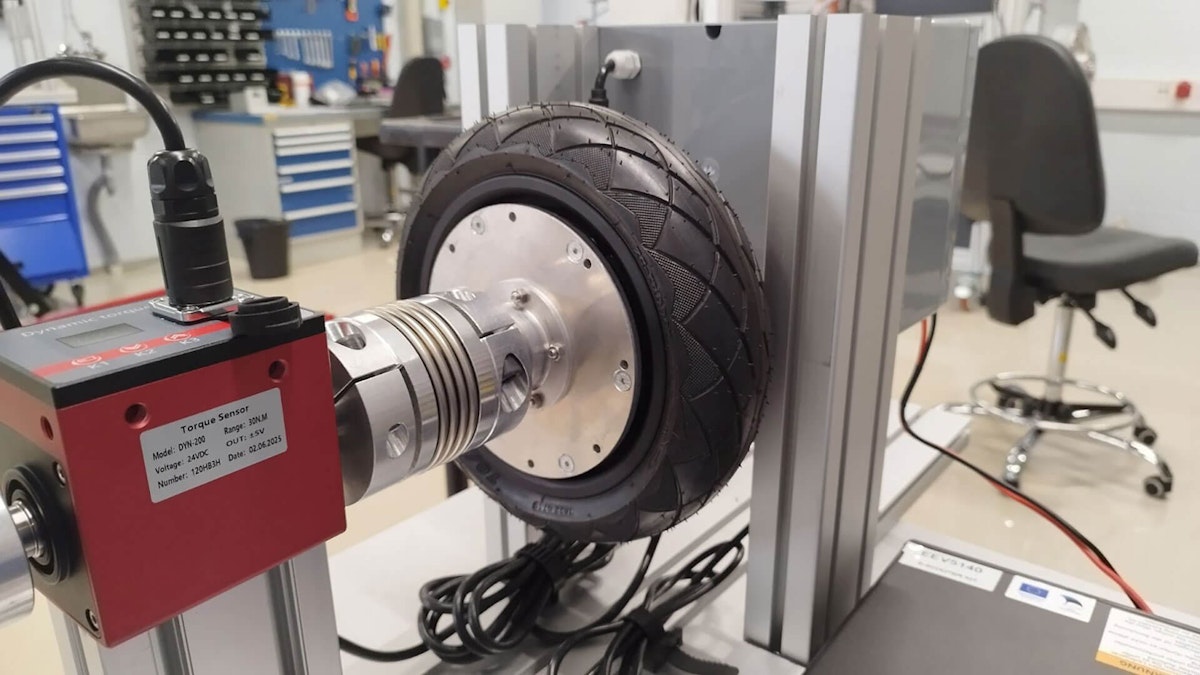
El banco de pruebas integra un motor sin escobillas (BLDC) con un freno de polvo, un sensor de par y una unidad de control unificada. Todos los componentes se conectan directamente con Dewesoft para mediciones y análisis flexibles y en profundidad.
Objetivo
El objetivo principal de esta aplicación es evaluar las características de rendimiento dinámico y en estado estable de los motores de corriente continua sin escobillas utilizados en patinetes eléctricos. Esta evaluación incluye determinar el par de bloqueo a varios valores de RPM fijos, crear un mapa de potencia y analizar las formas de onda eléctricas bajo diferentes condiciones de carga.

Las mediciones proporcionan información sobre cómo se comporta el motor cuando se somete a aumentos graduales de par, ayudando a identificar los límites de rendimiento del motor, como el par máximo (sostenible) a una velocidad dada.
Usando el módulo Power Analysis de Dewesoft, el sistema permite la observación y evaluación en tiempo real de las tensiones del controlador, las corrientes de fase y los parámetros relacionados con la potencia. Este módulo permite una comprensión completa del comportamiento del motor bajo perfiles variables de par de salida y velocidad.
Configuración de la medición
Utilicé un sistema de adquisición de datos Dewesoft SIRIUS aislado (SIRIUSi). Tiene cuatro entradas de señal de alto voltaje (HV) y cuatro de bajo voltaje (LV), perfecto para esta aplicación. Usé los canales de alto voltaje para medir la tensión de alimentación DC y las tres tensiones de fase del motor. Conecté los canales de bajo voltaje a pinzas de corriente para la medición de la corriente de entrada y de fase.
Un sensor de par DYN-200, con salida analógica de par y una señal en onda cuadrada de 6V para la velocidad, midió el par y la velocidad. Conecté esto a una unidad DAQ DEWE-43A. Un cable de sincronización sincronizó los dispositivos DAQ para asegurar la adquisición de señales eléctricas y mecánicas completamente alineadas en el tiempo.
Realicé el muestreo con un ancho de banda de 1 MHz para capturar las características de conmutación de alta frecuencia en las señales del controlador del motor. Todos los componentes, incluidos sensores y electrónica de control, se alimentaron por separado como parte de un diseño modular del banco de pruebas, garantizando aislamiento eléctrico y flexibilidad del sistema.
El sistema de medición completo incluyó los siguientes dispositivos y software:
Sistema de adquisición de datos
SIRIUSi-4xHV-4xLV – amplificador modular con 4x entradas analógicas HV (alto voltaje) y 4x entradas analógicas LV (bajo voltaje).
DEWE-43A – sistema de adquisición de datos (DAQ) USB de 8 canales para canales de entrada analógica adicionales y señales digitales.
Cable de sincronización – para sincronización precisa entre sistemas.
Sensores y transductores
Pinza de corriente CP30 (100 mV/A) – para corriente de alimentación
3x pinzas de corriente PR200 (10 mV/A) – para corrientes de fase del motor
Sensor de par DYN-200 (salida analógica 0-5 V, rango 30 Nm)
Salida de velocidad DYN-200 (onda cuadrada, amplitud 6 V)
Motor y carga
Motor BLDC para scooter - 1 kW, 48 V nominal
Controlador de motor – ASI BAC555
Máquina de carga/Freno de partículas – freno magnético de 25 Nm para carga mecánica ajustable.
Software de adquisición de datos y análisis
DewesoftX Professional – Para adquisición de datos sincronizada, visualización y análisis.
Módulo DewesoftX Power Analyzer – un paquete de software para análisis de potencia integral con más de 100 parámetros basados en tensión y corriente para analizar el consumo de energía del motor.


Metodología
El procedimiento de prueba consiste en ajustar el motor a RPM constantes y aumentar gradualmente el par del motor usando el freno de polvo hasta que el motor se detenga. Este procedimiento permite identificar el punto de par máximo a cada velocidad. Recopilé los datos utilizando las siguientes configuraciones de Dewesoft:
Osciloscopio: Utilizado para visualizar las tensiones del controlador del motor y las corrientes de fase. Las vistas del osciloscopio se activaron automáticamente para capturar instantáneas claras de las formas de onda. Se observaron patrones de modulación sinusoidal en las señales de tensión.
Filtrado: Apliqué un filtro pasa bajos a las corrientes de fase para reducir el ruido. Aunque introdujo un retraso menor en la señal, la compensación favoreció la precisión de la amplitud.
Cálculo del sensor de ángulo: Utilicé la señal de Frecuencia derivada del módulo de cálculo del sensor de ángulo para medir la velocidad de rotación del motor.
Osciloscopio vectorial: Utilizado para analizar las relaciones de fase entre tensión y corriente, permitiendo una comprensión más profunda del flujo de potencia en tiempo real con el aumento de la carga.
Medidores digitales: Mostraban valores medios de par, RPM, tensión de alimentación y corriente de alimentación.
Grabadores: Grabación continua del par y la velocidad del motor para identificar regiones de operación clave.


Análisis inicial
Realicé mediciones a velocidades de rotación que varían de 50 a 600 RPM, con incrementos de 50 RPM. La interfaz de análisis de Dewesoft permite una exploración conveniente de todos los datos registrados, con visualización sincronizada de valores instantáneos en múltiples canales:


Esta vista sincronizada es particularmente eficaz para identificar eventos transitorios o interacciones sutiles entre los dominios mecánico y eléctrico. Durante la fase de análisis, se aplicó filtrado adicional al canal de par para reducir el ruido y mejorar la claridad de la señal.
El módulo de software de potencia proporciona una visión clara de los ángulos de fase y del triángulo de potencia.


Las tensiones y corrientes de fase me ayudaron a evaluar si el motor está experimentando una carga desequilibrada o condiciones de funcionamiento anormales. El factor de potencia relativamente bajo indica que una cantidad significativa de potencia es reactiva, lo que confirma la carga ligera del motor en este momento en particular.
Análisis detallado
Dado que el análisis detallado en esta nota de aplicación requería solo datos de par y RPM, estos canales se exportaron como archivos MATLAB usando una escala de tiempo relativa.
El primer paso en el análisis consistió en generar perfiles del motor de par frente a velocidad. Estos gráficos ilustran las regiones de funcionamiento estables del motor y el par de salida máximo alcanzable en cada punto de consigna de velocidad. También se aprecia que el controlador del motor impone una limitación de potencia, lo que hace que el motor se detenga antes a mayores RPM:


El segundo gráfico presenta la potencia del motor en función del par y la velocidad. Esta visualización ayuda a identificar el punto de máxima potencia mecánica, que, nuevamente, está claramente limitado por las capacidades del controlador:


Conclusión
Los resultados confirmaron que Dewesoft proporciona una plataforma robusta y de alta resolución para capturar el comportamiento transitorio y en régimen permanente de los motores eléctricos.
Funciones clave como el disparo de forma de onda en tiempo real, el análisis intuitivo de vector scope y el filtrado flexible resultaron fundamentales para visualizar e interpretar las características del motor.
Algunos desafíos, como el ruido en la medición de corriente, se mitigaron mediante técnicas de filtrado digital y promediado.