




Integración de sistemas DAQ EtherCAT de Dewesoft con LabVIEW
Francesco Miccoli
May 28, 2025
EtherCAT® interconecta varios productos DAQ (sistemas de adquisición de datos) y de control dentro del ecosistema de Dewesoft, incluidas las series IOLITE, KRYPTON y OBSIDIAN. EtherCAT es un protocolo de comunicación robusto que permite la compatibilidad con diversos sistemas en tiempo real, incluidos los Controladores Lógicos Programables (PLCs). Los dispositivos EtherCAT pueden conectarse en cadena mediante un solo cable que transporta datos, alimentación y sincronización. El software DewesoftX está incluido y funciona a la perfección con cualquier combinación de dispositivos Dewesoft. Sin embargo, en ocasiones se ha desplegado LabVIEW® de National Instruments y es necesario integrar los instrumentos Dewesoft. Este artículo muestra cómo LabVIEW puede conectarse y adquirir datos de dispositivos EtherCAT de Dewesoft. Aunque se aplica a todos los sistemas Dewesoft basados en EtherCAT, incluidos IOLITE, KRYPTON y OBSIDIAN, este artículo se centra en el IOLITEi 3xMEMS-ACC.
El IOLITE 3xMEMS-ACC es un dispositivo de adquisición de datos Dewesoft con un acelerómetro MEMS triaxial integrado, convertidor analógico-digital e interfaz EtherCAT. Múltiples dispositivos IOLITE pueden distribuirse y sincronizarse fácilmente a lo largo de grandes estructuras utilizando un único cable económico CAT6 que puede abarcar hasta 50 metros entre nodos. Los conversores ópticos permiten distancias superiores a 20 km entre dispositivos manteniendo una precisión de sincronización de 1 µs. Una sincronización temporal precisa es crucial al realizar OMA (Análisis Modal Operacional) al evaluar la dinámica estructural, incluidas las frecuencias naturales, las formas modales y los coeficientes de amortiguamiento.
Como todos los sistemas de medición Dewesoft, IOLITE incluye el software de adquisición de datos DewesoftX y el acondicionamiento de señal. La línea de productos comprende registradores de datos multifunción y de alta velocidad para aplicaciones que requieren control de automatización. Están disponibles como módulos de canal único y de múltiples canales para sistemas de bajo y alto recuento de canales. Son dispositivos esclavos EtherCAT estándar que envían datos a cualquier sistema de control maestro EtherCAT de terceros. Cuando se conectan al software DAQ DewesoftX, la funcionalidad de retransmisión garantiza que no se pierdan muestras durante la medición.
Algunos modelos IOLITE están hechos para montarse en bastidores estándar de 19” mientras que otros pueden montarse en un riel DIN. Dispositivos diminutos como el IOLITE 3xMEMS-ACC pueden montarse directamente junto a la fuente de señal, lo que reduce las longitudes de cable desde el sensor, ahorrando costes, simplificando la complejidad y minimizando el ruido de la señal.


Descripción general de la tecnología EtherCAT:

Creación de archivo ENI
Los dispositivos EtherCAT solo pueden usarse dentro de una red EtherCAT configurada adecuadamente, la cual requiere un archivo ENI. Este archivo contiene la configuración completa de la red EtherCAT, incluida una lista de dispositivos, parámetros de comunicación, detalles de sincronización e información de intercambio de datos.
El video anterior describe el software Ackermann Automation EtherCAT Studio y su uso. Esta herramienta nos permite agregar el dispositivo IOLITE desde la biblioteca al árbol de configuración. A partir de ahí, podemos crear el archivo ENI (Master Configuration ETG Standard).


Adquisición de datos
El primer paso para adquirir datos será configurar nuestro equipo con el software LabVIEW. Este equipo es el EtherCATmaster, que maneja la comunicación con IOLITE y otros dispositivos.
La Ackermann Library para LabVIEW ofrece herramientas visuales convenientes para este propósito. Las imágenes a continuación muestran el bloque “Open Master Windows Compact”, que inicia el EtherCAT master local. Toma el archivo ENI creado previamente y parámetros de red, como el ciclo de bus, el puerto objetivo, la dirección IP, etc.


Para adquirir datos, el master debe establecerse en modo Operacional (“Op”). Para ello, podemos usar el bloque “Set Master State”.

.")
Ahora, podemos codificar el bucle de adquisición: un “ciclo while” que comprueba si hay datos nuevos en cada iteración. Una vez que los datos están disponibles, se desempaquetan y procesan. La estructura básica es:
Se consultan las variables esclavas, y el bloque “Query All Slaves Variables” produce una matriz 1D de clústeres, cada uno conteniendo información sobre una variable esclava, como tipo de dato, tamaño en bits, tamaño en bytes y más; estos datos se usarán para la conversión numérica durante la adquisición.
Se utiliza un bucle while para realizar la adquisición continua de datos en su interior:
El bloque “Read Process Data” genera la trama recién adquirida.
Un bucle for recorre el número de variables esclavas y convierte la trama a un valor numérico más legible. La conversión se basa en la propiedad “Base Data Type” extraída previamente durante la consulta de variables esclavas.
Finalmente, los datos numéricos adquiridos pueden utilizarse. En la imagen de abajo, se selecciona el tercer elemento del arreglo (esto corresponde a la aceleración en el eje Z, pero puede ser cualquier otro valor) y se concatena antes de graficarlo.


Después de que se adquieren los datos, el programa puede detenerse a través del panel de control. Esta acción activa la última porción del código, donde se realiza cierta limpieza. Esto consiste principalmente en:
Establecer el estado del master a Inicialización (“Init”)
Cerrar el Ethercat master
Manejo de errores
Configuración del dispositivo
En la sección anterior exploramos la adquisición de datos con LabVIEW, pero ¿cómo podemos ajustar la tasa de muestreo y el rango de nuestro dispositivo?
Primero, debemos entender dónde se almacenan los parámetros del dispositivo y cómo podemos cambiarlos, según Beckoff, los inventores del protocolo EtherCAT:
“La interfaz CoE (protocolo de aplicación CAN sobre EtherCAT) se utiliza para la gestión de parámetros de los dispositivos EtherCAT.”
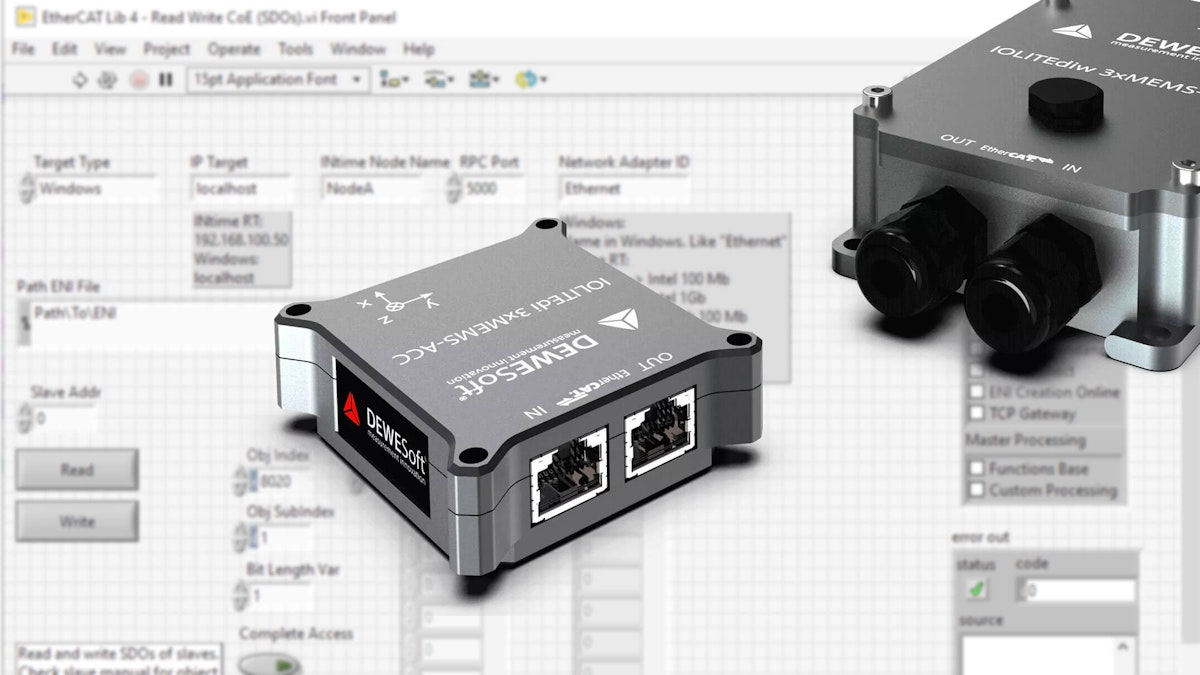
Lo mismo ocurre con el IOLITEi 3xMEMS-ACC. La biblioteca Ethercat instalada anteriormente proporciona un ejemplo llamado “Read Write CoE (SDOs),” que nos permite editar la configuración del dispositivo.


La imagen anterior muestra la interfaz del panel de control de este ejemplo. Los paneles más destacados incluyen:
Tipo de destino se refiere a la configuración de maestro deseada, con “Windows” seleccionado.
Para abrir el maestro EtherCAT de Windows, necesita el IP target, RPC port, network adapter ID, path ENI file, y timeout parámetros.
Datos de activación muestra información sobre la licencia activa.
Dirección del esclavo se refiere a la dirección del esclavo objetivo dentro de la red EtherCAT. Este número debe coincidir con la posición del esclavo objetivo dentro del árbol de configuración, con la numeración comenzando en 0. De lo contrario, se puede usar el bloque “Query Bus Setup” para entender mejor la estructura general de la red.
Índice de objeto y Subíndice de objeto se refieren a la dirección de destino, donde cada par de índice y subíndice apunta a una configuración diferente.
Escritura de datos y Lectura de datos se utilizan para leer/escribir datos desde/hacia la dirección especificada. Normalmente, solo se cambia una configuración a la vez, por lo que solo se necesita el primer elemento del arreglo.
La siguiente tabla vincula los índices con sus respectivas funciones:
| Propiedad | Índice | Subíndice | Valores |
|---|---|---|---|
| Sample Rate | 8020 | 1 | 3, 6, 12, 25, 50, 100, 125, 200, 250, 500, 1000 |
| Rango del eje X | 8040 | 1 | 0 (2g), 1 (4g), 2 (8g) |
| Rango del eje Y | 8041 | 1 | 0 (2g), 1 (4g), 2 (8g) |
| Rango del eje Z | 8042 | 1 | 0 (2g), 1 (4g), 2 (8g) |
| Encendido predeterminado | 8020 | 2 | 2 |
Conclusión
Integrar los sistemas DAQ de Dewesoft con LabVIEW a través de EtherCAT ofrece una solución robusta y flexible para la adquisición y el control de datos en tiempo real. Siguiendo el proceso descrito—crear un archivo ENI, configurar el maestro EtherCAT y utilizar la Ackermann Library de LabVIEW—los usuarios pueden conectar y adquirir datos de dispositivos Dewesoft sin inconvenientes, incluido el IOLITEi 3xMEMS-ACC. La capacidad de sincronizar con precisión múltiples dispositivos a lo largo de grandes distancias hace que esta integración sea especialmente valiosa para el análisis de dinámica estructural y las aplicaciones de automatización. Además, aprovechar la interfaz CoE permite a los usuarios ajustar finamente los parámetros de los dispositivos, asegurando un rendimiento óptimo. Esta integración permite a ingenieros e investigadores aprovechar plenamente las capacidades del hardware DAQ de Dewesoft y de LabVIEW en sus flujos de trabajo de medición y control.
Para más información
Se dispone de un manual técnico de usuario más detallado y de un VI de ejemplo para LabVIEW. El manual reflejará desarrollos futuros, incluyendo la incorporación de más dispositivos a la topología de prueba.
LabVIEW® es una marca registrada de National Instruments.
EtherCAT® y el logotipo de EtherCAT® son marcas comerciales o marcas registradas, licenciadas por Beckhoff Automation GmbH, Alemania.
El logotipo de Dewesoft es una marca registrada de Dewesoft d.o.o.
Todas las marcas comerciales son propiedad de sus respectivos propietarios.