




Bestimmung des Stillstandsdrehmoments bei bürstenlosen Gleichstrommotoren
Martin Võip
Tallinn University of Technology
September 4, 2025
Da Elektroscooter zunehmend die urbane Mobilität prägen, erhält das Verständnis des Drehmoment-Drehzahl-Verhaltens ihrer bürstenlosen Gleichstrommotoren (Brushless DC Motor, BLDC) eine entscheidende Bedeutung. Mit Echtzeitanalysetools können Ingenieure deren Wirkungsgrad abbilden und Grenzen der Motorleistung bestimmen, die für die Optimierung von Design und Steuerungsstrategien von entscheidender Bedeutung sind. Das Stillstandsdrehmoment und die Leistungsabgabe unter variierenden Lasten lassen sich mithilfe eines maßgeschneiderten, mit Dewesoft-Tools ausgestatteten Prüfstands bewerten.
Die Elektromobilität verändert den Stadtverkehr rasant, und Elektroscooter entwickeln sich zu einem zentralen Element. Das Verständnis der dynamischen Leistung und des Wirkungsgrads der in diesen Scootern eingesetzten BLDC-Motoren ist für Techniker und Studierende gleichermaßen von Bedeutung.
Die Technische Universität Tallinn (TalTech) ist eine forschungsorientierte Universität mit Schwerpunkten auf Ingenieurwesen, Wirtschaft, öffentlicher Verwaltung und maritimen Themen. Sie zählt nahezu 10 000 Studierende, von denen etwa 11 % aus über 100 Ländern weltweit stammen.
Ein BLDC-Motor wird mit Gleichstrom betrieben, kommt jedoch ohne die mechanischen Bürsten und den Kommutator klassischer Bürstenmotoren aus. An ihrer Stelle übernimmt ein elektronischer Regler die Umschaltung der Stromrichtung in den Motorwicklungen.
Der Rotor enthält typischerweise Permanentmagnete, während der Stator mit Wicklungen ausgestattet ist. Der Wegfall von Bürsten reduziert Reibung und Verschleiß, wodurch BLDC-Motoren einen höheren Wirkungsgrad, eine längere Lebensdauer und einen leiseren Lauf aufweisen. Gleichzeitig verringert sich der Wartungsbedarf.
BLDC-Motoren sind heute aufgrund ihres hohen Wirkungsgrads, ihrer präzisen Regelbarkeit und ihrer kompakten Bauweise weit verbreitet.
Sie haben verschiedene Anwendungen, darunter
Elektroautos,
Elektroscooter,
Drohnen,
Verbraucherelektronik (z. B. Kühlventilatoren für Computer),
industrielle Automatisierung,
HLK-Systeme,
...
Für diese spezifische Anwendung wurde ein speziell angepasster Prüfstand verwendet. Der Aufbau zeigt, wie Dewesoft-Tools das Drehzahl- und Drehmomentverhalten von Motoren charakterisieren können. Außerdem lassen sich Echtzeit-Steuerwellenformen beobachten und Wirkungsgradkennfelder von Elektromotoren unter Last erstellen.


BLDC-Motoren werden aufgrund ihrer hohen Effizienz, geringen Wartung und kompakten Bauweise häufig in elektrischen Individualfahrzeugen eingesetzt. Um ihre Leistung unter realen Bedingungen, wie steilen Steigungen oder hohen Belastungen, zu optimieren, ist es jedoch notwendig, die Drehmoment-Drehzahl-Charakteristik und den Wirkungsgrad unter verschiedenen Betriebsbedingungen zu verstehen.
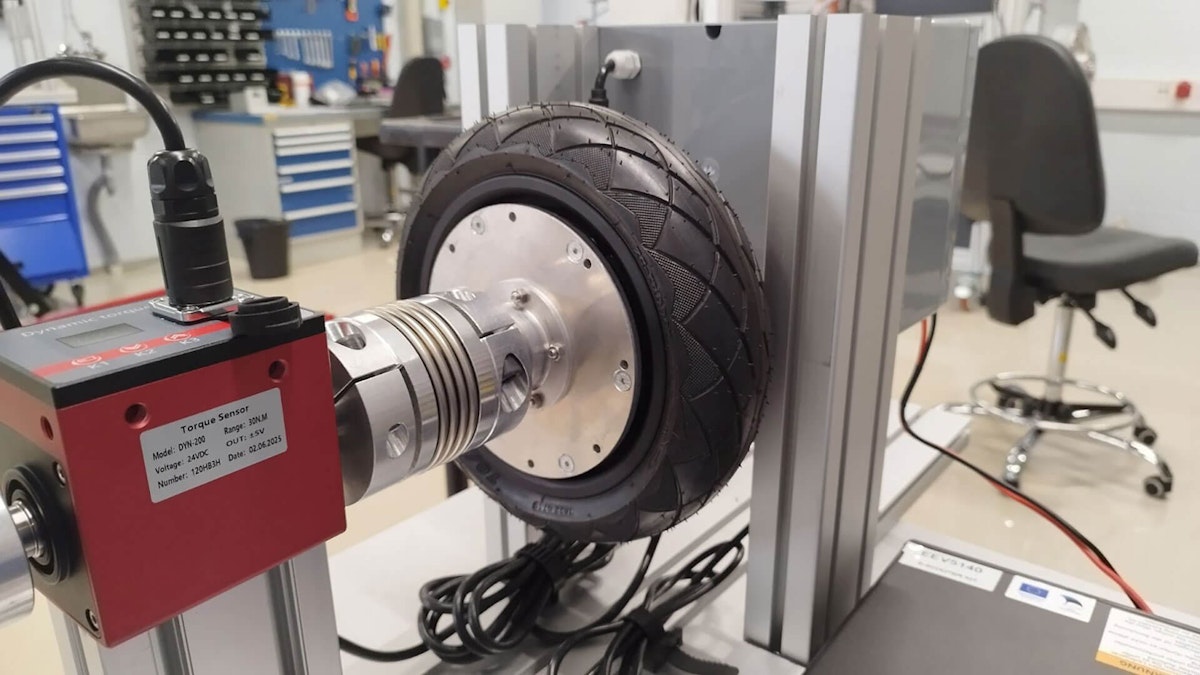
Der Prüfstand umfasst einen BLDC-Motor mit Pulverbremse, einen Drehmomentsensor und eine einheitliche Steuereinheit. Alle Komponenten sind direkt mit Dewesoft-Modulen verbunden, was eine flexible und detaillierte Messung und Analyse ermöglicht.
Zielsetzung
Das primäre Ziel dieser Anwendung ist die Bewertung der dynamischen und stationären Leistungscharakteristik von bürstenlosen Gleichstrommotoren, wie sie in Elektroscootern zum Einsatz kommen. Diese Bewertung umfasst die Bestimmung des Stillstandsdrehmoments bei verschiedenen festen Drehzahlen, die Erstellung eines Leistungskennfelds sowie die Analyse elektrischer Wellenformen unter unterschiedlichen Lastbedingungen.

Die Messungen bieten Einblicke in das Verhalten des Motors bei allmählich zunehmendem Drehmoment und helfen, die Leistungsgrenzen des Motors, wie z. B. das maximale dauerhafte Drehmoment bei einer gegebenen Drehzahl, zu ermitteln.
Die Verwendung des Leistungsanalysemoduls von Dewesoft erlaubt es dem System, Steuerungsspannungen, Phasenströme und leistungsbezogene Parameter in Echtzeit zu beobachten und zu bewerten. Das Modul ermöglicht ein umfassendes Verständnis des Motorverhaltens bei variierenden Ausgangsdrehmoment- und Drehzahlprofilen.
Messaufbau
Zum Einsatz kam ein isoliertes Datenerfassungssystem des Typs SIRIUSi von Dewesoft, das über vier Hochspannungs- und vier Niederspannungseingänge verfügt und somit ideal für diese Anwendung geeignet ist. Die Hochspannungskanäle wurden zur Messung der DC-Versorgungsspannung sowie der drei Motorphasen-Spannungen verwendet. Die Niederspannungskanäle waren mit Stromzangen verbunden, um Eingangs- und Phasenströme zu messen.
Ein DYN-200-Drehmomentsensor mit analogem Ausgang und 6‑V-Rechtecksignal lieferte Drehmoment- und Drehzahldaten und war hierfür mit einem DEWE-43A-Datenerfassungsmodul verbunden. Ein Synchronisationskabel stellte sicher, dass die elektrischen und mechanischen Signale vollständig synchronisiert aufgenommen wurden.
Die Abtastung erfolgte mit einer Abtastrate von 1 MHz, um hochfrequente Schaltvorgänge in der Motorsteuerung aufzuzeichnen. Alle Komponenten, einschließlich der Sensoren und der Steuerelektronik, wurden im Rahmen eines modularen Prüfstanddesigns, das sowohl elektrische Isolation als auch Systemflexibilität gewährleistet, separat mit Strom versorgt.
Das Messsystem umfasste die folgenden Geräte und Software:
Datenerfassungssystem
SIRIUSi-4xHV-4xLV – modularer Verstärker mit 4 Hochspannungs- und 4 Niederspannungs-Analogeingängen
DEWE-43A – 8-kanaliges USB-Datenerfassungssystem für zusätzliche analoge Eingangskanäle und digitale Signale
Synchronisationskabel – für eine präzise zeitliche Abstimmung
Sensoren und Wandler
Stromzange CP30 (100 mV/A) – zur Messung der Versorgungströme
3x Stromzange PR200 (10 mV/A) – zur Messung der Motorphasenströme
Drehmomentsensor DYN-200 (Analogausgang 0–5 V, Drehmomentbereich bis 30 Nm)
Drehzahlausgang DYN-200 (Rechtecksignal, Amplitude 6 V)
Motor und Last
BLDC-Scootermotor – 1 kW, 48 V Nennspannung
Motorsteuerung – ASI BAC555
Lastmaschine/Pulverbremse – Magnetpulverbremse (25 Nm) zur regelbaren mechanischen Belastung
Datenerfassungs- und Analysesoftware
DewesoftX Professional – zur synchronisierten Erfassung, Visualisierung und Analyse von Daten
DewesoftX Power Analyzer Module – Softwaremodul zur umfassenden Leistungsanalyse mit über 100 spannungs- und strombasierten Parametern zur Bewertung des Motorenergieverbrauchs


Methodik
Beim Prüfverfahren wurde der Motor auf eine konstante Drehzahl eingestellt und das Drehmoment dann mithilfe der Pulverbremse schrittweise erhöht, bis der Motor blockierte. So konnte der Drehmoment-Spitzenwert bei jeder Drehzahl bestimmt werden. Für die Datenerfassung wurden folgende Dewesoft-Konfigurationen eingesetzt:
Oszilloskop: Zur Visualisierung der Spannungen und Phasenströme der Motorsteuerung. Die automatisch ausgelösten Aufnahmen ermöglichten klare Momentaufnahmen der Wellenformen. Dabei waren sinusförmige Modulationsmuster in den Spannungssignalen zu beobachten.
Filterung: Auf die Phasenströme wurde ein digitaler Tiefpassfilter angewendet, um Rauschen zu reduzieren. Dies führte zwar zu einer geringen Signalverzögerung, der Kompromiss erhöhte jedoch die Amplitudenpräzision.
Winkelsensormathematik: Das Frequenzsignal des Winkelsensormathematik-Moduls diente zur Bestimmung der Motordrehzahl.
Vektorskop: Wurde zur Analyse der Spannungs- und Stromphasenbeziehungen eingesetzt und lieferte detaillierte Einblicke in den Echtzeit-Leistungsfluss bei steigender Last.
Digitale Messskalen: Anzeige der Durchschnittswerte von Drehmoment, Drehzahl, Versorgungsspannung und Versorgungsstrom.
Rekorder: Kontinuierliche Aufzeichnung von Motordrehmoment und Drehzahl zur Identifizierung wichtiger Betriebsbereiche.


Anfängliche Analyse
Die Messungen erfolgten bei Drehzahlen von 50 U/min bis 600 U/min in 50-U/min-Schritten. Die Analyseoberfläche von Dewesoft ermöglicht die komfortable Auswertung aller erfassten Daten mit synchroner Darstellung von Momentanwerten über mehrere Kanäle:


Die synchronisierte Ansicht eignet sich besonders zur Erkennung transienter Ereignisse und subtiler Wechselwirkungen zwischen mechanischen und elektrischen Größen. Der Drehmomentkanal wurde in der Analysephase zusätzlich gefiltert, um Rauschen zu reduzieren und die Signalqualität zu verbessern.
Das Leistungsmodul der Software bot einen klaren Überblick über die Phasenwinkel und das Leistungsdreieck.


Die Phasenspannungen und -ströme ermöglichten es, zu beurteilen, ob der Motor einer unausgeglichenen Last oder ungewöhnlichen Betriebsbedingungen ausgesetzt war. Der relativ niedrige Leistungsfaktor wies auf einen signifikanten Anteil an Blindleistung hin und bestätigte damit die geringe Motorauslastung in diesem Moment.
Detaillierte Analyse
Da für die detaillierte Analyse in dieser Anwendung nur Drehmoment- und Drehzahldaten benötigt wurden, wurden diese Kanäle mit relativer Zeitbasis als MATLAB-Dateien unter Verwendung einer relativen Zeitskala exportiert.
Im ersten Schritt wurden Drehmoment-Drehzahl-Kennlinien des Motors erstellt. Diese Diagramme zeigen die stabilen Betriebsbereiche des Motors und das bei jedem Drehzahlsollwert maximal erreichbare Ausgangsdrehmoment. Hier wurde ersichtlich, dass die Motorsteuerung eine Leistungsbegrenzung vorgibt, wodurch der Motor bei höheren Drehzahlen früher zum Stillstand kommt:


Das zweite Diagramm zeigt die Motorleistung in Abhängigkeit von Drehmoment und Drehzahl. Diese Darstellung ermöglicht die Identifizierung des Punktes der maximalen mechanischen Leistungsabgabe, die wiederum klar durch die Leistungsfähigkeit der Steuerung begrenzt war:


Fazit
Die Ergebnisse bestätigten, dass Dewesoft eine robuste und hochauflösende Plattform zur Erfassung des transienten und stationären Verhaltens von Elektromotoren bereitstellt.
Schlüsselfunktionen wie die Echtzeit-Auslösung der Wellenformen, die intuitive Vektorskop-Analyse und die flexible Filterung erwiesen sich als entscheidend für die Visualisierung und Interpretation des Motorverhaltens.
Einige Herausforderungen, wie das Strommessrauschen, konnten durch digitale Filter- und Mittelungsverfahren erfolgreich reduziert werden.