




Optimering av hydrofoilprestanda med hjälp av modalanalys och piezoelektrisk resonant shuntdämpning
Shouhong Qin, Master student of structural mechanics
CNAM
September 26, 2024
För att optimera det dynamiska beteendet hos hydrofoiler har forskare använt piezoelektrisk resonant shuntdämpning. Denna teknik innebär en detaljerad modalanalys av hydrofoilens struktur, följt av att systemet justeras till en specifik egenfrekvens med hjälp av induktorer. Den experimentella uppställningen använder piezoelektriska element för att styra böjning och torsion samt mäter frekvensresponsfunktioner (FRF) i både öppna och kortslutna tillstånd.
Vad är hydrofoiler?
Hydrofoiler fungerar på ett liknande sätt som flygplansvingar. De är undervattensvingar eller formade blad som är fästa under skrovet på en båt eller ett fartyg för att generera lyftkraft när fartyget rör sig genom vattnet. Genom att lyfta skrovet ur vattnet minskar hydrofoiler motståndet, vilket gör att fartyget kan uppnå högre hastigheter och bättre bränsleeffektivitet.
Att tillämpa piezoelektrisk resonant shuntdämpning på en hydrofoil syftar till att förbättra dess dynamiska prestanda genom att integrera piezoelektriska material för att kontrollera böjning och torsion. Detta innovativa tillvägagångssätt kan optimera vibrationsdämpning och ge värdefulla insikter för utveckling inom marin- och flygteknik.
Genom en serie laboratorietillfällen syftar vi till att genomföra en detaljerad modalanalys och designa passiva induktorer. Vi kommer också att implementera resonanta shuntkretsar för att minska vibrationerna hos en NACA-hydrofoil.
Experimentets process
Vid laboratoriet för strukturell mekanik och kopplade system vid CNAM (Conservatoire National des Arts et Métiers) tillämpade vi tre steg för att studera piezoelektrisk resonant shuntdämpning implementerad på en hydrofoil. Det första avgörande steget är att genomföra en modalanalys av strukturen.
Det andra steget innebär att föreslå flera möjliga lösningar för att justera strukturen till en specifik egenfrekvens. Det tredje steget är att validera frekvensresponsen efter att induktorn implementerats i kretsen.
Modalanalys av hydrofoilen
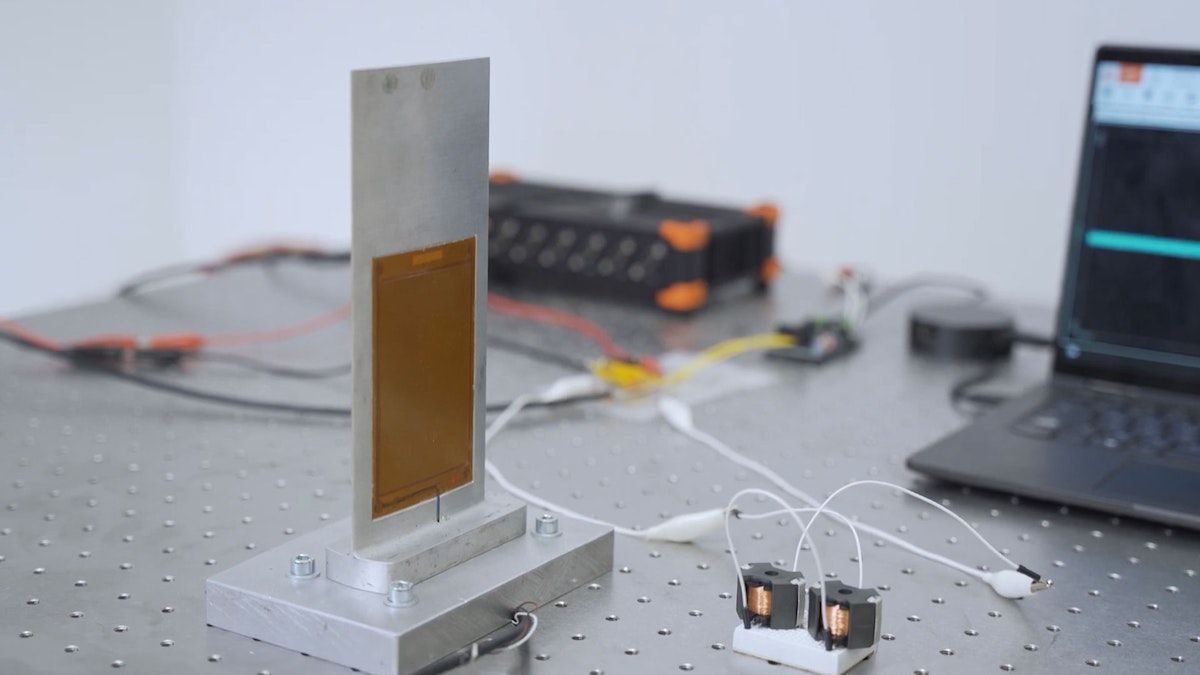
Hydrofoilen har två piezoelektriska element för att kontrollera böjning på ena sidan och ett element på den andra sidan för att kontrollera torsion. I denna experimentella uppställning används ett av de två “böjnings”-elementen som excitationsingång och det andra som mätutgång. Ingången är en excitationsspänning, och utgången är spänningen över elektroderna på mätelementet.
Under experimentet mätte vi FRF både i kortslutet tillstånd och i öppet tillstånd, och den dynamiska responsen hos denna platta skiljer sig åt på grund av de piezoelektriska elementen.


Den valda excitationstypen för detta experiment är “chirp”. Detta val baseras på att en chirpsignal kan omfatta ett brett frekvensområde, vilket gör det möjligt att studera frekvensresponsen över ett stort frekvensintervall med en enda excitation.
En chirpsignal är en typ av signal där frekvensen ökar eller minskar över tid. Den används ofta i tillämpningar som radar, sonar, kommunikation och vibrationstestning eftersom den gör det möjligt att mäta ett systems respons över ett brett frekvensområde. Den mjuka svepningen från låga till höga (eller höga till låga) frekvenser gör chirpsignaler effektiva för att identifiera hur olika frekvenser påverkar ett system eller en miljö.
Lista över datainsamlingshårdvara och mjukvara
För datainsamling och analys använde vi:
DEWE-43: Det är ett mångsidigt 8-kanals USB-datainsamlingssystem. Den handhållna enheten har åtta universella analoga ingångar, åtta digitala/räknar-/enkoderingångar samt två högsnabba CAN-bussingångar.
DewesoftX: DewesoftX är programvara för datainsamling och signalbehandling för mätning av signaler, datainsamling, bearbetning och visualisering inom många test- och mättillämpningar på olika marknader.
Två grupper av FRF-data erhålls genom att koppla bort och ansluta de två elektroderna på “torsions”-elementet, vilket motsvarar öppet respektive kortslutet tillstånd. Vi kommer att studera två toppar:
Det första vibrationsläget (böjning) uppträder vid cirka 98 Hz;
Det andra (torsion) uppträder vid cirka 520 Hz.
Vi extraherade FRF i området 500 till 540 Hz för ett mer detaljerat resultat för det andra läget. Figur 2 visar resultaten för kortslutet och öppet tillstånd.


Efter att ha mätt FRF-data behöver vi beräkna den piezoelektriska kapacitansen. För att undvika påverkan från modformer mätte vi kapacitansen vid en frekvens långt från läge 1 och 2. Kapacitansen vid 1000 Hz är 13,62 nF, uppmätt med en kapacitansmätare.
För att bestämma det exakta värdet av egenfrekvensen för läge 2 implementerade vi metoden Rational Fraction Polynomial (RFP) och analyserade data som erhölls i DewesoftX.
Vi erhöll kurvanpassning och egenfrekvensresultat genom att köra RFP och ortogonala funktioner. Figur 3 och 4 visar FRF som syntetiserats med RFP-metoden för både kortslutet och öppet tillstånd, vilka korrekt approximera de experimentella FRF.


I nästa steg kan vi extrahera de naturliga vinkelhastigheterna i kortslutet och öppet tillstånd genom följande samband:
Därmed kan vi bestämma den erforderliga optimala induktansen L och resistansen R med hjälp av ekvationerna.
Egenfrekvens (kortslutning) = 518.4547 Hz
Egenfrekvens (kortslutning) = 520.4007 Hz
Naturlig vinkelhastighet (kortslutning) = 3.2575e+03 rad/s
Naturlig vinkelhastighet (kortslutning) = 3.2698e+03 rad/s
Kopplingsfaktor = 8.67 %. Induktans = 6.9 H. Resistans = 2388.5 Ω
Kopplingsfaktorn visar skillnaden mellan kortslutna och öppna kretsförhållanden. Plattan svarar vid en något högre frekvens i öppet tillstånd än i kortslutet tillstånd. Denna variation visar att de elektriska randvillkoren har ett betydande inflytande på hydrofoilens mekaniska vibrationer.
Design och realisering av den passiva induktorn
Som visas i figur 5 består en passiv induktors struktur av fyra delar: kärna, spolform, spole och klämmor. I denna session är kärntypen RM (från TDK Electronics), och spolen består av koppartråd.


Efter att ha lärt oss om strukturen fokuserar vi på induktorns induktans, resistans och fyllnadsfaktor. Induktansvärdet är direkt beroende av antalet lindningsvarv och den magnetiska kretsens permeans, härledd från formeln med som permeans och N som antal varv.
I vårt fall är induktansen 6,9 H. Data från TDK Electronics ger värdet på permeansen. Varje typ av RM har flera olika permeansvärden. Vi kan bestämma antalet varv från formeln.
För det andra modellerar (series resistance) kopparförluster i ledningen, och R_p (parallellresistans) modellerar järnförluster i den magnetiska kretsen, se figur 5. I detta fall försummar vi parallellresistansen och definierar då resistansen som:
är kopparns resistivitet, som är 17.2 µΩ.mm. 𝑙𝑁 är ledningens längd, definierad av olika typer av RM-kärnor, och är ledningens tvärsnittsarea. Därefter introducerar vi fyllnadsfaktorn,
Där är lindningens tvärsnittsarea, som beror på spolformen. Eftersom fyllnadsfaktorn vanligtvis är omkring 0,5 hjälper detta värde till att bestämma en lämplig tråddiameter. Resistansen kan också beräknas genom:
beror också på spoltypen. Om vi utför beräkningen bör och ge liknande resultat.
I nästa steg beräknar vi diametern för den motsvarande kärntyp som används för att tillverka induktorn. Vi kan använda Matlab-koden i figur 6 för att uppskatta antalet varv, tvärsnittsarean, serieresistansen, resistansen , och slutligen trådens diameter. I detta fall används beräkningen av både och för att kontrollera om dessa formler är ekvivalenta.

.")
Målet är att hitta en lösning som vi kan tillverka med hänsyn till diametern på befintliga koppartrådar:
Den första lösningen använder RM14, ogappat material PC200. I detta fall är den teoretiska serieresistansen 75.28 Ω, och resistansen med en koppartrådsdiameter på 0.2 mm är 70.84 Ω.
En andra lösning använder RM12, ogappat material N87 (eller N97). I detta fall är den teoretiska serieresistansen 37.30 Ω, och resistansen med en koppartrådsdiameter på 0.2 mm är 38.04 Ω.
En tredje lösning är att använda två redan tillgängliga RM10-induktorer med induktanser på 1.5 H och 6.0 H samt resistanser på 72 Ω och 325 Ω. Denna lösning ger en relevant hög resistans och kan kopplas ihop med två motstånd på 1000 Ω för att passa den optimala resistansen för den tidigare definierade resonanta shunten.
Implementering av resonanta shuntar för ett enskilt läge
Vi implementerar lösningen med de två induktorerna och studerar flera frekvensresponser i olika fall. Målet är först att erhålla frekvensresponsen kring hydrofoilens andra egenfrekvens utan induktorer. Därefter lägger vi till induktorerna i kretsen och jämför resultaten. Slutligen kommer vi att göra flera justeringar av resistans och induktans för att passa den optimala parameter som tidigare erhållits.
Först mäter vi frekvensresponsen utan induktorerna genom spänning/spänning-FRF i frekvensområdet [470, 570] Hz. Vi använder detta resultat som referens för jämförelse efter att induktorerna anslutits.
För det andra implementerar vi induktorkretsen, där den totala induktansen är 1.5 H + 6.0 H = 7.5 och den totala resistansen är 72 Ω + 325 Ω = 397 Ω.
Därefter erhåller vi frekvensresponsdata (spänning/spänning) både utan och med induktorer.
Se resultatet i figur 7 genom Matlab-plottning.

Resultatet av den ursprungliga frekvensresponsen är tillfredsställande, eftersom vi kan observera toppen i figuren. Vi ser också den starka effekten av den resonanta shunten tack vare FRF som erhålls med induktorn.
Dessa resultat är dock svåra att tolka eftersom användning av spänning som utgång kan göra det svårt att utvärdera korrekt avstämning av shunten. Därför använder vi i följande experiment acceleration som utgång för att studera detaljerna i strukturens dynamiska beteende.
Efter att ha lagt till en accelerometer i den experimentella uppställningen erhåller vi nya frekvensresponsdata i figur 8 och 9.




Dessa två figurer visar att induktorerna avsevärt minskade strukturens vibrationsamplitud kring den andra egenfrekvensen. Däremot är induktorernas resistans lägre än målresistansen, som är 2388.5 Ω. Vi använder Matlab för att plotta data som exporterats från DewesoftX-programvaran och för att jämföra resultaten.
Vi lade till två extra motstånd på 1000 Ω för att uppnå den optimala resistansen. Figur 10 visar resultaten i följande fall: 1) utan induktor, 2) utan motstånd i serie med induktorerna, och 3) med 2000 Ω i serie med induktorerna.

Om kretsens resistans inte ligger nära det optimala värdet blir strukturens respons två toppar med medelhög amplitud. Efter att ha lagt till extra resistans blir kretsens resistans 397 Ω + 2000 Ω = 2397 Ω, vilket ligger nära det optimala värdet på 2388.5 Ω.
Med optimal resistans minimeras den dynamiska responsen över ett bredare frekvensområde jämfört med fallet med 397 Ω.
Vi lade till extra resistans för att studera hur resistansen påverkar FRF. Dessutom ligger de två topparna i fallet med optimal resistans inte på samma horisontella nivå. Detta kan eventuellt förbättras genom att justera induktansvärdet.
I nästa steg jämför vi därför fallen med optimal R, överskotts-R samt optimal R och L. Figur 11 visar att extra resistans återskapar toppen i egenfrekvensområdet. Vi ser också att induktansvärdet kan påverka balansen i höjd mellan de två topparna kring frekvensresponsen.

Slutsats
Den resonanta shunten kan avsevärt förbättra strukturens dynamiska beteende kring ett specifikt läge. Dämpningsprestandan kan förbättras med rätt induktans och resistans, som ligger nära de optimala värden som beräknats teoretiskt. Resistansen påverkar topparnas höjd. Ett lägre än optimalt värde ger två högre toppar, medan ett högre än optimalt värde återskapar en enda topp.
Slutligen kan induktansvärdet påverka balansen mellan de två topparna. Dessa justeringsmöjligheter ger stora möjligheter för vibrationsreducering i mekaniska strukturer inom olika tillämpningar, inklusive luft- eller hydrofoiler som utsätts för flödesexcitationer.