




Otimização dos parâmetros de controle do inversor e mapeamento térmico de um carro da Fórmula SAE
Pietro Cipriani, Gianluca Manzi, Matteo Vincelli e Francesco Giuseppe Quilici
University of Pisa, DESTEC
August 27, 2025
A E-Team Squadra Corse da Universidade de Pisa iniciou uma campanha de testes orientada por dados para melhorar o desempenho e a confiabilidade do seu carro elétrico Formula SAE. O objetivo era otimizar os parâmetros de controle do inversor e validar o modelo térmico do sistema de baterias. Em colaboração com a Dewesoft e a Radio6ense, a equipe obteve insights críticos sobre a dinâmica do trem de força e o comportamento térmico em condições de corrida, utilizando aquisição de dados de alta frequência e mapeamento térmico baseado em RFID.
Ao lidar com sistemas complexos do tipo caixa-preta, compreendê-los totalmente é sempre um desafio. Ainda assim, quando se trata de desempenho, é essencial fazer tudo o possível para aumentar o nível de conhecimento. Além disso, a temperatura dos componentes num carro de corrida Formula SAE é sempre crítica, especialmente quando precisa percorrer 22 km no menor tempo possível.
Estas necessidades levaram à colaboração de vários parceiros, incluindo a E-Team Squadra Corse da Universidade de Pisa, a Dewesoft e a Radio6ense. O sistema de medição de alta frequência e alta precisão da Dewesoft, juntamente com a caracterização térmica fornecida pelo inovador sistema SixSense, desenvolvido pela Dewesoft e pela Radio6ense, permitiram atingir os nossos dois objetivos:
A E-Team Squadra Corse é a equipa de Formula SAE da Universidade de Pisa. Composta por mais de 100 estudantes de várias faculdades, a equipa projeta, constrói e desenvolve protótipos de carros de corrida elétricos para competir em eventos internacionais de Formula Student.
A Dewesoft é líder mundial e referência em soluções de aquisição e análise de dados. Os seus sistemas, que integram hardware modular e software intuitivo, garantem precisão, fiabilidade e elevada flexibilidade operacional.


A Radio6ense é uma empresa inovadora que desenvolve soluções tecnológicas avançadas nas áreas de comunicações, eletrónica e automação. A utilização da tecnologia de identificação por radiofrequência, RFID, revelou-se particularmente interessante para esta aplicação, pois permitiu implementar um sistema de monitorização avançado.
A colaboração entre a E-Team Squadra Corse e a Dewesoft não é recente. Em 2024, foi realizado um teste com resultados satisfatórios para validar os modelos dinâmicos do veículo e resolver os problemas associados ao sistema de propulsão do primeiro protótipo elétrico da equipa, o EV-A. Especificamente, o problema ocorria quando se ultrapassava um determinado nível de potência, fazendo com que o carro começasse a oscilar longitudinalmente, seguido de um desligamento.
Leia a história completa de 2024:

Através da análise de dados em pós-processamento utilizando o software DewesoftX, foi possível identificar as causas, que acabaram por ser atribuídas a uma parametrização incorreta do sistema de controlo do motor. Após este sucesso, foi planeada uma campanha de testes para 2025 com o objetivo de melhorar a compreensão do veículo e apoiar o seu desenvolvimento.
Controlo do inversor e mapeamento térmico
Ao trabalhar no nosso novo carro de corrida, a divisão técnica da equipa enfrentou dois desafios críticos:
otimizar os parâmetros de controlo dos inversores comerciais, que apresentam baixa transparência no seu funcionamento, e
validar o comportamento térmico do pack de baterias, essencial para garantir desempenho e fiabilidade durante a corrida.
Graças à instrumentação da Dewesoft e ao apoio da Radio6ense, foi possível realizar medições de alta resolução de grandezas elétricas fundamentais, incluindo tensões e correntes, bem como variáveis térmicas em múltiplos pontos. Isso permitiu uma análise detalhada da dinâmica de funcionamento do sistema de propulsão em condições reais.
O nosso segundo carro elétrico, o ET-16, possui um sistema de propulsão com tração traseira composto por dois motores elétricos de fluxo axial EMRAX 188. Este conjunto proporciona um binário máximo de 100 Nm e uma velocidade máxima de 8000 rpm, controlados por inversores DTI HV-500. O sistema é alimentado por uma bateria com capacidade de 7 kWh e tensão máxima de 600 V.
A Figura 1 ilustra o sistema de propulsão do veículo.

, DTI HV-500 inverter (in red), and battery (in light blue).")
Para atingir ambos os objetivos, a otimização dos parâmetros de controlo e o mapeamento térmico, dividimos os testes em duas partes. Cada uma está relacionada com os ensaios dinâmicos realizados durante as competições de verão, Aceleração e Endurance.
O teste de aceleração ocorre numa reta de 75 m, com o objetivo de percorrer essa distância no menor tempo possível a partir de uma partida parada. Conhecer e compreender como o carro reage às alterações nos parâmetros do controlador permite minimizar esse tempo.
Por outro lado, o teste de endurance é realizado num circuito misto ao longo de várias voltas, cobrindo uma distância total de 22 km. A evolução térmica dos componentes mais críticos do veículo, conforme prevista pelos modelos disponíveis à equipa, permite criar mapas personalizados para executar os testes dinâmicos mais exigentes de forma mais eficaz durante um fim de semana de competição.
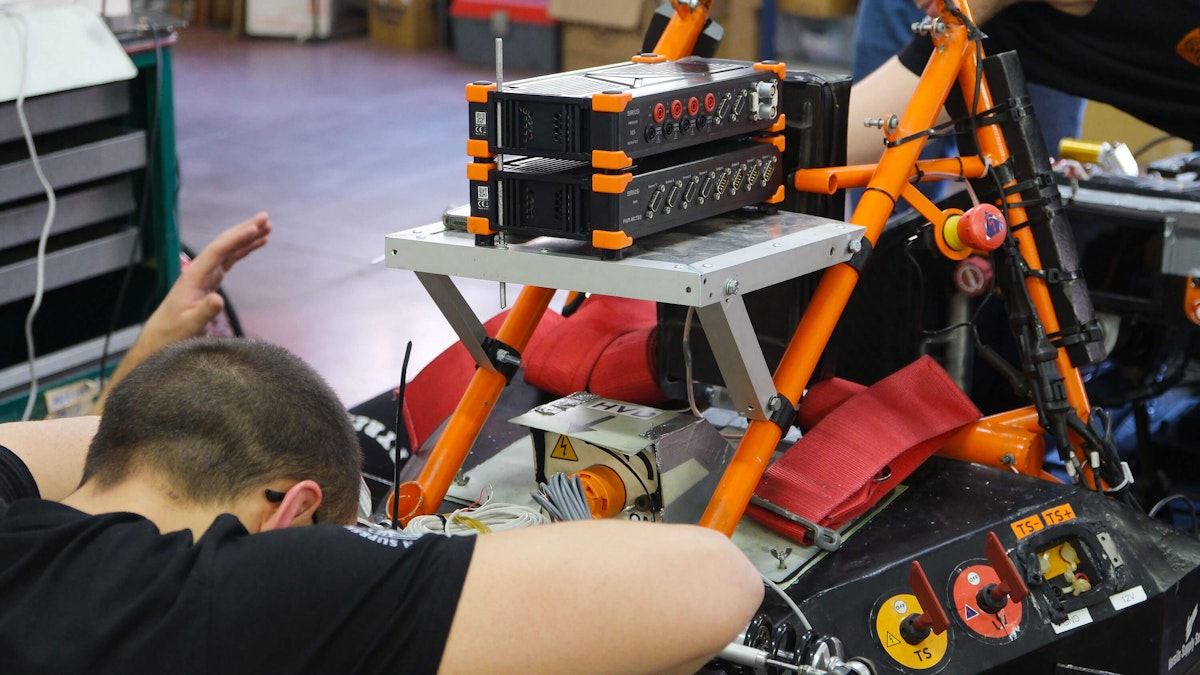
Configuração de medição
A coordenação entre os equipamentos e sensores fornecidos pela Dewesoft permitiu montar uma configuração de medição a partir dos diversos sensores visíveis nas imagens seguintes.




A bateria de baixa tensão do veículo forneceu a alimentação a bordo. As grandezas elétricas medidas no lado AC incluíram duas correntes e três tensões concatenadas de alimentação do motor esquerdo, bem como uma corrente do motor direito. No lado DC, os sensores de tensão e corrente foram instalados a jusante da bateria.
A frequência de amostragem dos sinais medidos foi deliberadamente elevada, atingindo 800 kHz, para permitir a observação detalhada de todas as particularidades do comportamento elétrico do veículo. Realizámos o mapeamento térmico instalando sensores de temperatura em várias partes da zona traseira do carro. Foram analisadas, em particular, quatro áreas: a roda direita, a roda esquerda, os motores e a bateria, não visível na imagem. No total, utilizámos os seguintes dispositivos:
SIRIUS-XHS-4xHV-4xLV, um sistema de aquisição de dados de alta velocidade com taxa de amostragem de 15 MS/s por canal, com tecnologia HybridADC
Três transdutores de corrente DC-C, sensores que oferecem as vantagens de um transdutor de fluxo zero com menor consumo de energia e design mais compacto
Pinças de corrente, sensores de alta precisão para medições AC e DC e análise de potência
Quatro entradas de alta tensão, diretamente no sistema SIRIUS XHS
Sistema de navegação inercial Navion i2, INS e IMU, compacto e robusto
Computador com software DewesoftX
Quatro antenas recetoras
Dezanove sensores de temperatura RFID
Campanha experimental de medições
O programa de trabalho para o dia de testes em pista incluiu:
Corridas de instalação
Várias corridas de aceleração
Corridas de endurance
O local de testes foi um parque de camiões disponibilizado à equipa em Buti, a cerca de 30 km de Pisa. Os testes decorreram durante toda a tarde, entre momentos de satisfação e pequenos contratempos, prontamente resolvidos pelos membros da equipa.


Teste de aceleração
O teste de aceleração teve como objetivo analisar a resposta em degrau do veículo e estimar a potência instantânea absorvida pelos motores durante o funcionamento.
Com a instrumentação fornecida, foi possível determinar e observar como os motores respondiam, em termos de potência, aos comandos do condutor. Em particular, tratando-se de um sistema trifásico, utilizámos algumas funções da aplicação matemática do DewesoftX para calcular a corrente não medida em falta como:
Neste ponto, é possível calcular a potência instantânea em função das duas correntes medidas diretamente e de duas das três tensões fase a fase medidas:
Utilizando a fase 2 como referência, utilizámos as tensões fase a fase e eliminámos qualquer erro no cálculo de :
Aplicámos também um filtro passa-baixo para focar o teste de aceleração e facilitar a visualização da potência. Especificamente, utilizámos um filtro Butterworth de ordem 6 com uma frequência de corte de 1,5 kHz.
Os gráficos de potência e de potência filtrada apresentam um desfasamento de −3π, conforme esperado. Curiosamente, a potência instantânea em regime permanente apresenta uma componente de frequência duas vezes superior à das grandezas básicas de tensão e corrente.
A única componente convertida de potência elétrica em potência mecânica no eixo é a potência ativa, que é gerada apenas pelas componentes harmónicas presentes simultaneamente na tensão e na corrente.

.")
Caracterizámos completamente um dos motores através de duas medições de corrente e realizámos uma única medição no outro. Isso permitiu verificar que ambos os motores funcionavam corretamente quando submetidos ao mesmo perfil de binário.

 and right motor (blue).")
Como esperado, observamos que os dois motores apresentam formas de onda idênticas. Confirmámos isso pelo facto de as duas correntes estarem desfasadas por um ângulo de aproximadamente metade do período da própria onda. Também é evidente a presença de ruído de alta frequência no sinal principal, igualmente pronunciado em ambos os motores e relacionado com a comutação dos respetivos inversores.
A capacidade de aquisição de alta frequência dos sistemas Dewesoft permitiu detetar e distinguir a contribuição desse ruído de comutação. Isto fornece dados valiosos para otimizar os parâmetros de controlo dos inversores e validar o comportamento dinâmico do sistema.
Teste de endurance
O objetivo dos testes de endurance foi caracterizar os componentes do veículo em termos do seu desempenho térmico. No entanto, a duração limitada destes testes não revelou aumentos significativos de temperatura para a maioria dos componentes. Ainda assim, para validar o modelo térmico da bateria, o foco foi colocado na realização de uma análise térmica detalhada deste componente específico.


Durante a aquisição, que serviu como referência, obtivemos uma compreensão de como a temperatura se distribui pelas diferentes partes da bateria.

, sensor 002F (located at the top of the battery), and sensor 0062 (located at the back of the battery).")
Os dados medidos permitiram determinar experimentalmente o ponto mais quente na superfície da bateria. A imagem mostra um ligeiro aumento de temperatura durante as voltas, seguido de uma pausa final, durante a qual a temperatura começa a diminuir. Entre os sensores instalados, o traseiro registou a temperatura mais elevada, cerca de 27 °C, enquanto os sensores superior e lateral registaram temperaturas finais de 24,3 °C e 25,4 °C, respetivamente.
A partir destes dados, verifica-se que, embora a variação de temperatura seja limitada num intervalo de tempo tão curto, a parte traseira do pack aquece mais, seguida pela lateral e pela parte superior. Esta observação está de acordo com o esperado. A disposição dos módulos implica que a zona traseira e as laterais do conjunto estejam sujeitas a maior transferência de calor.
Resultados das medições
A campanha de medições permitiu uma análise detalhada do comportamento do sistema de propulsão. O teste de aceleração foi utilizado para caracterizar a resposta em degrau, enquanto o teste de endurance permitiu validar o modelo térmico da bateria.
Teste de aceleração
As aquisições permitiram obter a resposta em degrau do sistema conversor-motor em termos da corrente em quadratura, Iq. Esta é uma grandeza transformada através da transformação de Park, que facilita a compreensão do comportamento das máquinas elétricas.
A transformação também fornece as componentes do eixo direto, eixo d, e do eixo z. No entanto, no modo de binário constante, um controlador em malha fechada mantém a componente direta próxima de zero, e a componente no eixo z é negligenciável para o estudo da dinâmica da máquina. Aplicámos ainda um filtro passa-baixo à corrente em quadratura para reduzir o ruído de medição.
A resposta em degrau é particularmente relevante, pois excita todas as frequências do sistema, permitindo analisar o seu comportamento. Foi determinado um tempo de estabelecimento de 3%, ou seja, o tempo necessário para a resposta permanecer dentro de uma banda de ±3% em torno do valor final, de 97,03 ms, e um sobressinal percentual de 1,949%, correspondente à diferença entre o valor máximo atingido e o valor final.
O gráfico apresenta a resposta e o sinal de entrada gerado como referência para o controlador do conversor. Como o sinal de entrada é comandado pelo condutor e não é digital, é normal observar uma evolução com uma subida não instantânea.


Baseámos as considerações anteriores na configuração mais recente dos parâmetros do controlador. Durante o dia de testes, realizámos várias tentativas para determinar os parâmetros ideais, tanto do ponto de vista do veículo como do piloto. A análise em pós-processamento permitiu então selecionar a configuração ótima com base nas evidências experimentais obtidas.
Resultados do teste de aceleração, procura dos parâmetros ótimos do controlador
|
Parâmetros do controlador |
Ensaios |
||||
|
1 |
2 |
3 |
4 |
5 |
|
| Kp |
0.5 |
3 |
1 |
0.7 |
0.5 |
| Ki |
100 |
100 |
100 |
150 |
150 |
| Comentários |
Configuração inicial |
O carro “assobia” |
Configuração ótima |
Pior do que o ensaio 3 |
Resposta lenta |
Teste de endurance
Antes de comparar as medições experimentais com as simulações, apresentamos uma breve descrição da construção do modelo eletrotérmico da bateria.
Devido à natureza dinâmica da estimativa que pretendemos obter, a abordagem utilizada é a da modelação por circuito equivalente, ou seja, a obtenção de estimativas de tensão e temperatura das diferentes partes da bateria através do uso de elementos equivalentes, como resistências e capacitâncias elétricas e térmicas. A Figura 11 apresenta um esquema dos circuitos utilizados como referência.

 and thermal (b) equivalent circuits were adopted for the electrothermal battery model.")
Especificamente, adotámos o modelo R-C de um bloco para a parte elétrica. Este modelo é capaz de reproduzir o comportamento dinâmico da tensão quando o sistema é sujeito a uma determinada corrente. Por outro lado, para o modelo térmico, utilizámos um sistema de primeira ordem composto pela capacidade térmica e pela resistência térmica dos elementos modelados.
Os parâmetros do circuito elétrico foram obtidos através de ensaios experimentais em laboratório, enquanto os parâmetros térmicos foram estimados com base na geometria do pack de baterias. Inicialmente, definimos ambos os circuitos ao nível da célula. Devido à modularidade inerente do sistema de armazenamento, a transição do nível da célula para o nível do pack no circuito elétrico pode ser feita simplesmente através do escalonamento dos parâmetros.
No entanto, isso não é possível para o circuito térmico sem recorrer a hipóteses adicionais.
Foi precisamente com base nesse aspeto que os testes permitiram avaliar a validade dessas hipóteses, uma vez que a transição do nível da célula para o conjunto completo é particularmente sensível no modelo térmico. A Figura 12 mostra o modelo desenvolvido no ambiente Modelica, acompanhado por imagens explicativas dos elementos modelados.
A entrada do modelo é a corrente da bateria medida durante o teste. Devido às simetrias existentes, modelámos cada módulo com um quarto dos elementos, células, existentes. Cada grupo de células comunica elétrica e termicamente com os restantes através da rede representada no modelo, com ligações em azul e vermelho.
Existe ainda uma camada adicional, não visível na imagem do modelo, relacionada com a espessura do alumínio presente, na qual realizámos a validação, uma vez que os sensores de temperatura RFID foram posicionados nas superfícies externas da estrutura.


A comparação entre as medições experimentais e as temperaturas previstas pelo modelo revelou as seguintes tendências:


Observa-se um comportamento contrastante nos resultados obtidos. Conforme evidenciado pela aquisição do sensor 0045, não houve sinal durante toda a sessão, enquanto durante a pausa o modelo respondeu bem à previsão de temperatura.
Também para o sensor 0062, localizado na parte traseira da bateria, o modelo parece prever com precisão a temperatura registada. No entanto, para o sensor 002F, localizado na parte superior da bateria, o modelo sobrestima a temperatura real em cerca de 2 a 3 °C, indicando uma parametrização ligeiramente menos precisa nesta zona.
Por outro lado, os resultados obtidos pelo modelo na estimativa da temperatura superficial do pack são satisfatórios. Isso permitiu dar maior relevância à avaliação da temperatura das células, que constituem a parte mais quente da bateria.
Conclusão
O teste, realizado em colaboração com a Dewesoft e a Radio6ense, melhorou significativamente a nossa compreensão do veículo, tanto do ponto de vista elétrico como térmico. Os dados obtidos permitiram validar os modelos desenvolvidos e caracterizar com precisão a resposta em degrau do carro da E-Team Squadra Corse, um passo fundamental na otimização dos parâmetros do controlador do motor.
Além disso, a utilização bem-sucedida do mapeamento térmico baseado em RFID demonstrou uma abordagem fiável para monitorizar e validar o comportamento da bateria sob condições dinâmicas de carga. Estes resultados são essenciais não só para melhorar o protótipo ET-16, mas também como base para futuras evoluções do veículo, contribuindo para maior desempenho, segurança e eficiência em pista.
A E-Team Squadra Corse agradece à Dewesoft, em particular a Davide Carniani e Marco Ribichini, pela oportunidade e pelo apoio prestado ao longo de toda a organização dos testes, desde a instrumentação até à análise dos resultados.
Agradecemos também à Radio6ense, especialmente a Francesco Lestini, pelo suporte com a tecnologia RFID, que se revelou extremamente eficaz mesmo em simulações reais de corrida. Esta colaboração representa um passo importante no percurso da equipa rumo à excelência em engenharia e ao sucesso competitivo nas competições de Formula Student.