




Determinando o torque de estol do motor BLDC
Martin Võip
Tallinn University of Technology
September 4, 2025
À medida que as trotinetes elétricas continuam a moldar o futuro da mobilidade urbana, compreender a relação torque-velocidade dos seus motores BLDC é crucial. Utilizando ferramentas de análise em tempo real, os engenheiros podem mapear a eficiência e identificar limitações do motor que são críticas para otimizar estratégias de projeto e de controlo. Uma bancada de ensaio personalizada com tecnologia Dewesoft pode avaliar o torque de bloqueio e a potência de saída sob cargas variáveis.
A mobilidade elétrica transforma rapidamente o transporte urbano, com as trotinetes elétricas a tornarem-se um elemento-chave. Compreender o desempenho dinâmico e a eficiência dos motores DC sem escovas (BLDC) usados nestas trotinetes é essencial para engenheiros e estudantes.
A Tallinn University of Technology (TalTech) é uma universidade baseada na investigação, especializada em engenharia, negócios, administração pública e assuntos marítimos. A universidade tem quase 10.000 estudantes matriculados, aproximadamente 11% dos quais provêm de mais de 100 países diferentes em todo o mundo.
Um motor DC sem escovas (BLDC) é um motor elétrico que opera usando corrente contínua (DC) mas sem as escovas mecânicas e o comutador encontrados em motores tradicionais. Em vez de usar escovas para alternar a direção da corrente nas bobinas do motor, um motor BLDC utiliza um controlador eletrónico.
O rotor tipicamente contém ímanes permanentes, enquanto o estator tem bobinas. A ausência de escovas reduz o atrito, o desgaste e as necessidades de manutenção, tornando os motores BLDC mais eficientes, mais duradouros e mais silenciosos.
Os motores BLDC são populares em dispositivos modernos devido à sua elevada eficiência, controlo preciso e design compacto.
Os motores BLDC têm aplicação em várias áreas:
Veículos elétricos
Trotinetes elétricas
Drones
Eletrónica de consumo (por exemplo, ventoinhas de arrefecimento de computadores)
Automação industrial
Sistemas HVAC
etc.
Para esta aplicação, utilizei um banco de ensaio construído à medida. A configuração demonstra como as ferramentas Dewesoft podem caracterizar o comportamento velocidade-motor e o comportamento torque-velocidade. Também permite observar formas de onda do controlador em tempo real e construir mapas de eficiência de motores elétricos sob carga.


Os fabricantes utilizam amplamente motores BLDC em veículos elétricos pessoais devido à sua elevada eficiência, baixa manutenção e tamanho compacto. No entanto, para otimizar a sua aplicação em condições reais, como inclinações acentuadas ou cargas elevadas, é necessário compreender as suas características de torque-velocidade e a eficiência sob diferentes condições de funcionamento.
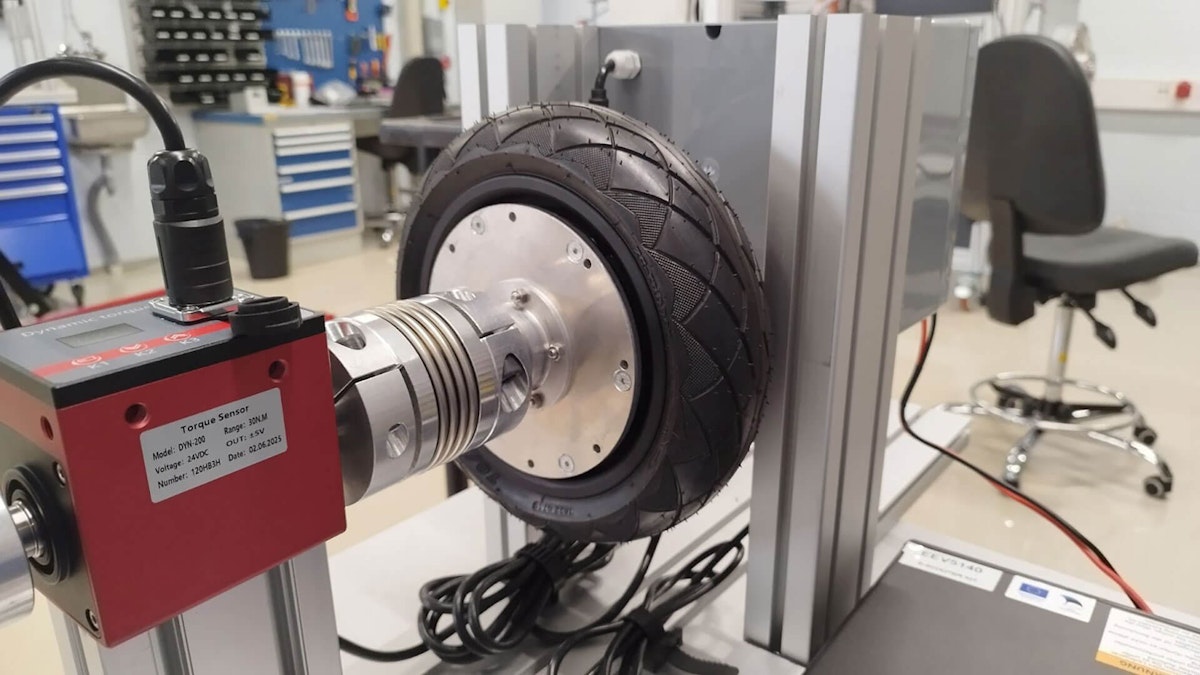
O banco de ensaio integra um motor sem escovas (BLDC) com um travão de pó, um sensor de torque e uma unidade de controlo unificada. Todos os componentes interligam-se diretamente com o Dewesoft para medições e análise flexíveis e aprofundadas.
Objetivo
O objetivo principal desta aplicação é avaliar as características de desempenho dinâmico e em regime permanente dos motores DC sem escovas usados em trotinetes elétricas. Esta avaliação inclui a determinação do torque de bloqueio a vários valores fixos de RPM, a criação de um mapa de potência e a análise das formas de onda elétricas sob diferentes condições de carga.

As medições fornecem informação sobre como o motor se comporta quando sujeito a aumentos graduais de torque, ajudando a identificar os limites de desempenho do motor, como o torque máximo (sustentável) a uma dada velocidade.
Usando o módulo Power Analysis da Dewesoft, o sistema possibilita a observação e avaliação em tempo real das tensões do controlador, correntes de fase e parâmetros relacionados com potência. Este módulo permite uma compreensão abrangente do comportamento do motor sob perfis de torque e velocidade de saída variáveis.
Configuração de medição
Utilizei um sistema de aquisição de dados Dewesoft SIRIUS isolado (SIRIUSi). Possui quatro entradas de sinal de alta tensão (HV) e quatro de baixa tensão (LV), perfeito para esta aplicação. Usei os canais de alta tensão para medir a tensão de alimentação DC e as três tensões de fase do motor. Liguei os canais de baixa tensão a pinças de corrente para medição da corrente de entrada e das correntes de fase.
Um sensor de torque DYN-200, com saída analógica de torque e um sinal de onda quadrada de 6V para velocidade, mediu o torque e a velocidade. Liguei-o a uma unidade DAQ DEWE-43A. Um cabo de sincronização sincronizou os dispositivos DAQ para garantir a aquisição de sinais elétricos e mecânicos totalmente alinhados no tempo.
Realizei a amostragem com uma largura de banda de 1 MHz para capturar as características de comutação de alta frequência nos sinais do controlador do motor. Todos os componentes, incluindo sensores e eletrónica de controlo, foram alimentados separadamente como parte de um layout modular do banco de ensaio, garantindo isolamento elétrico e flexibilidade do sistema.
Todo o sistema de medição incluiu os seguintes dispositivos e software:
Sistema de aquisição de dados
SIRIUSi-4xHV-4xLV – amplificador modular com entradas analógicas 4x HV (alta tensão) e 4x LV (baixa tensão).
DEWE-43A – Sistema de Aquisição de Dados USB de 8 canais (DAQ) para canais de entrada analógica adicionais e sinais digitais.
Cabo de sincronização – para sincronização precisa entre sistemas.
Sensores e transdutores
Pinça de corrente CP30 (100 mV/A) – para corrente de alimentação
3x pinças de corrente PR200 (10 mV/A) – para correntes das fases do motor
Sensor de torque DYN-200 (saída analógica 0–5 V, faixa de 30 Nm)
Saída de velocidade DYN-200 (onda quadrada, amplitude 6 V)
Motor e carga
Motor BLDC para scooter - 1 kW, 48 V nominal
Controlador de motor – ASI BAC555
Máquina de carga / Freio de pó – freio de partículas magnéticas de 25 Nm para carregamento mecânico ajustável.
Software de DAQ e análise
DewesoftX Professional – Para aquisição de dados, visualização e análise sincronizadas.
Módulo DewesoftX Power Analyzer – um pacote de software para análise de energia abrangente com mais de 100 parâmetros baseados em tensão e corrente para analisar o consumo de energia do motor.


Metodologia
O procedimento de teste envolve ajustar o motor para uma RPM constante e aumentar gradualmente o torque do motor usando o freio de pó até que o motor pare. Esse procedimento permite identificar o ponto de torque máximo em cada velocidade. Capturei os dados usando as seguintes configurações do Dewesoft:
Osciloscópio: Usado para visualizar as tensões do controlador do motor e as correntes de fase. As visualizações do osciloscópio foram acionadas automaticamente para capturar instantâneos de forma de onda nítidos. Foram observáveis padrões de modulação senoidal nos sinais de tensão.
Filtragem: Apliquei um filtro passa-baixa às correntes de fase para reduzir o ruído. Embora tenha introduzido um pequeno atraso de sinal, a compensação favoreceu a precisão de amplitude.
Matemática do Sensor de Ângulo: Usei o sinal de frequência derivado do módulo de matemática do sensor de ângulo para medir a velocidade de rotação do motor.
Escopo Vetorial: Usado para analisar as relações de fase entre tensão e corrente, permitindo uma visão mais profunda do fluxo de potência em tempo real com o aumento da carga.
Medidores Digitais: Exibia valores médios de torque, RPM, tensão de alimentação e corrente de alimentação.
Gravadores: Gravação contínua do torque e da velocidade do motor para identificar as principais regiões de operação.


Análise inicial
Realizei medições em velocidades de rotação variando de 50 a 600 RPM, com incrementos de 50 RPM. A interface de análise do Dewesoft permite a exploração conveniente de todos os dados gravados, com visualização sincronizada de valores instantâneos em múltiplos canais:


Essa visualização sincronizada é particularmente eficaz para identificar eventos transitórios ou interações sutis entre os domínios mecânico e elétrico. Durante a fase de análise, foi aplicada filtragem adicional ao canal de torque para reduzir o ruído e melhorar a clareza do sinal.
O módulo de software de potência fornece uma visão clara dos ângulos de fase e do triângulo de potência.


As tensões e correntes de fase ajudaram-me a avaliar se o motor está a sofrer uma carga desequilibrada ou condições de funcionamento anormais. O fator de potência relativamente baixo indica que uma quantidade significativa de potência é reativa, confirmando a baixa carga do motor neste momento.
Análise detalhada
Como a análise detalhada nesta nota de aplicação exigia apenas dados de torque e RPM, esses canais foram exportados como arquivos MATLAB usando uma escala de tempo relativa.
O primeiro passo na análise envolveu gerar perfis do motor torque versus velocidade. Esses gráficos ilustram as regiões de operação estáveis do motor e o torque máximo de saída alcançável em cada ponto de ajuste de velocidade. Também é evidente que o controlador do motor impõe uma limitação de potência, fazendo com que o motor sofra estol mais cedo em rotações (RPM) mais altas:


O segundo gráfico apresenta a potência do motor em função do torque e da velocidade. Essa visualização ajuda a identificar o ponto de potência mecânica máxima, que, novamente, é claramente limitado pelas capacidades do controlador:


Conclusão
Os resultados confirmaram que a Dewesoft fornece uma plataforma robusta e de alta resolução para capturar o comportamento transitório e em regime permanente de motores elétricos.
Recursos-chave, como o acionamento da forma de onda em tempo real, a análise vetorial intuitiva e a filtragem flexível, mostraram-se fundamentais na visualização e interpretação das características do motor.
Alguns desafios, como o ruído nas medições de corrente, foram mitigados usando técnicas de filtragem digital e de média.